
清华大学联合多家机构在iclr 2025发表的最新研究成果《diffusion-based planning for autonomous driving with flexible guidance》提出了一种创新的自动驾驶规划方法——diffusion planner。该方法基于diffusion transformer架构,有效解决了现有基于学习的规划方法对后处理的严重依赖问题。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
Diffusion Planner的核心优势在于:
技术细节:
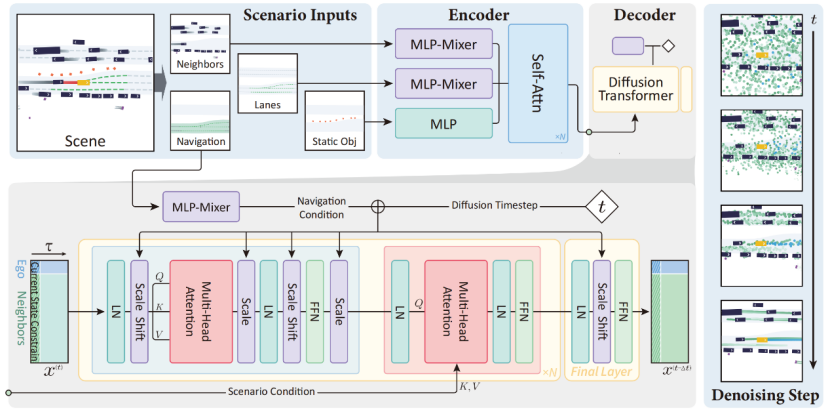
Diffusion Planner巧妙地融合了加噪轨迹和条件信息(周围车辆历史信息、道路信息、静态障碍物、导航信息等),通过交叉注意力机制进行信息交互。为了避免模型重复自车历史行为,仅考虑自车当前位置和朝向作为起始状态引导。
实验结果:
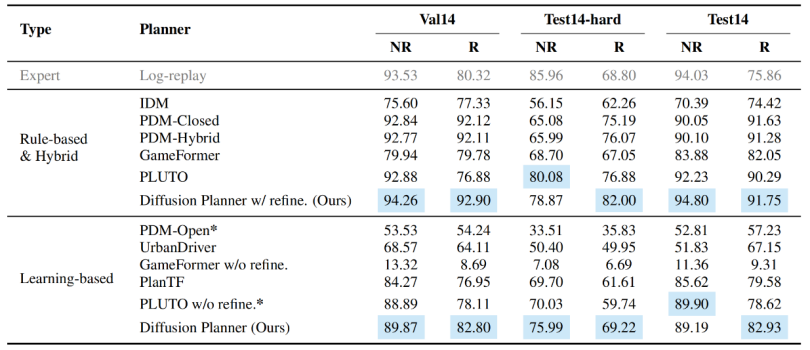
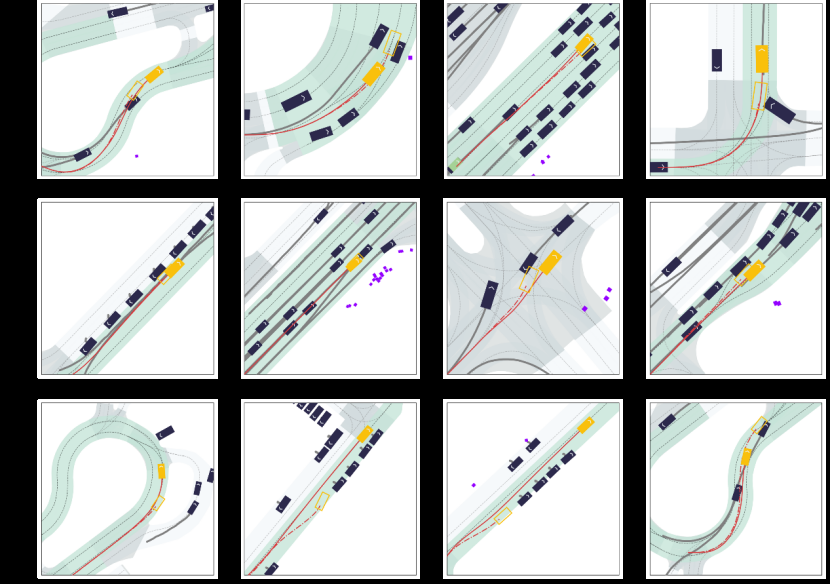
在nuPlan数据集的闭环仿真测试中,Diffusion Planner在多个测试基准上达到SOTA性能,并显著降低了对后处理的依赖。 此外,在毫末智行提供的200小时真实世界物流小车数据上的测试也验证了其在不同驾驶场景下的鲁棒性和迁移能力。
总结:
Diffusion Planner 是一种具有突破性的自动驾驶规划方法,它充分利用了扩散模型的优势,并通过巧妙的架构设计,实现了高效、鲁棒且灵活的规划能力。其在真实数据集上的出色表现,为自动驾驶技术的进一步发展提供了新的方向。 论文链接:https://www.php.cn/link/50ac4b2d6257c591a057a922533f77d5 项目主页:https://www.php.cn/link/11ab8d1653073d047c16ede5947fc64d
以上就是ICLR 2025 | Diffusion Planner: 基于扩散模型的自动驾驶规划算法,nuPlan SOTA!的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

 广告
广告Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 846
846
























