







中国科学院上海微系统与信息技术研究所仿生视觉系统实验室李嘉茂研究员团队在双目立体视觉深度估计领域取得突破性进展。其研究成果“f2r2: 基于频率滤波的鲁棒立体匹配方法”已被机器人领域顶级国际会议2025 ieee international conference on robotics and automation(icra)接收。
双目立体视觉技术模拟人类双眼视觉原理,通过分析来自不同视角的图像来重建三维深度信息。这项技术广泛应用于机器人、自动驾驶、元宇宙、工业检测和医疗自动化等领域。
传统的立体匹配方法依赖于精确的相机标定和校正,但在实际应用中,相机参数容易因碰撞、震动或温度变化而漂移,导致深度估计精度下降甚至算法失效。 现有的一些在线自标定方法虽然试图解决这个问题,但其校正效果在特征稀疏场景下往往不理想。
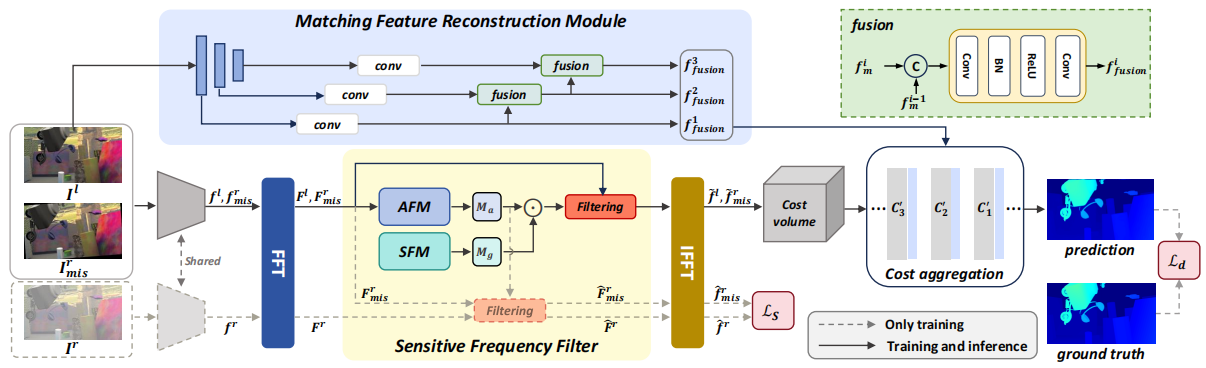
为此,该团队另辟蹊径,提出了一种基于频率滤波的立体匹配方法F2R2,直接处理未经严格校正的双目图像。F2R2通过巧妙的频率滤波策略和匹配特征重构模块,增强了模型对相机参数漂移的鲁棒性,同时保持了较高的深度估计精度。 该方法具有良好的通用性,可以集成到各种现有的立体匹配模型中。
团队在KITTI2015、KITTI2012、Middlebury、ETH3D等公开数据集以及自建数据集上进行了实验验证,结果表明,F2R2在不同程度的相机参数扰动下均表现出优异的性能。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
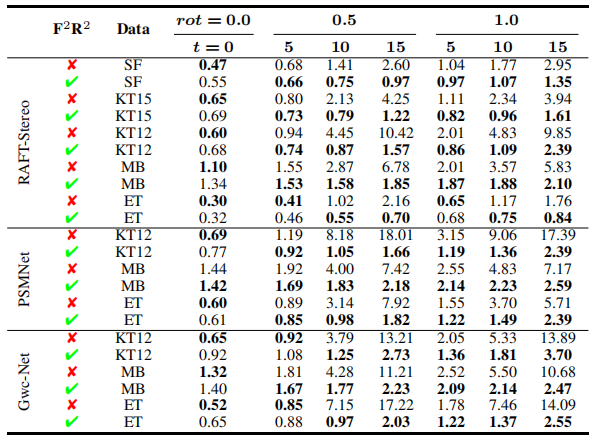
F2R2算法在多个权威双目数据集上显著提升了模型的鲁棒性(EPE误差,数值越小,性能越高)
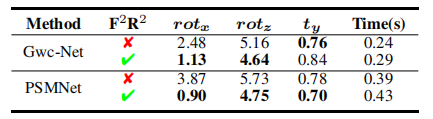
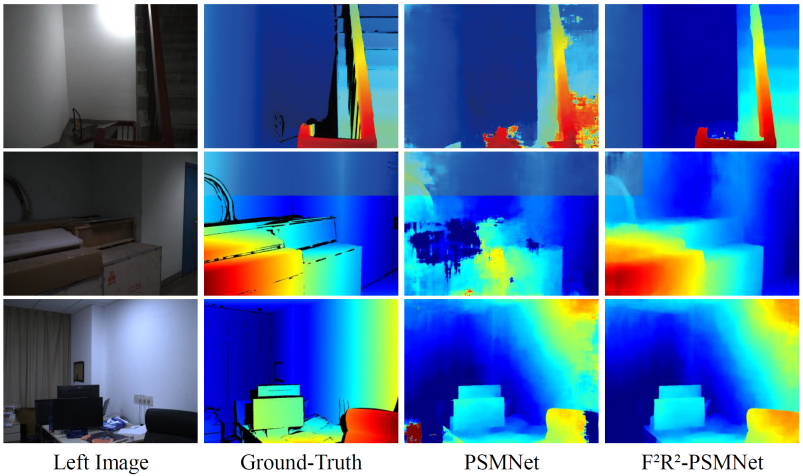
F2R2算法在自采集数据集上也显著提升了模型的鲁棒性(EPE误差,数值越小,性能越高)
该研究得到了科技部科技创新2030项目、国家自然科学基金、上海市自然基金、中国科学院青年创新促进会和上海市优秀学术带头人等项目的资助。 上海微系统所仿生视觉系统实验室周昊龙博士研究生和朱冬晨研究员为论文共同第一作者,李嘉茂研究员为通讯作者。




























