
新华社北京4月19日电(记者魏梦佳)驱动器是一种能够进行可控变形的器件,被誉为微型机器人的“心脏”。清华大学的科研团队最新开发出一种薄膜状的微型驱动器,其功能类似于“变形金刚”,能够使微型机器人实现连续的形态变化并“锁定”其特定动作形态,增强其环境适应能力。
研究人员指出,通过使用这种驱动器以及团队开发的“搭积木”式设计方法,成功制备出目前已知的最小、最轻的微型无线陆空两栖机器人,体长9厘米,重25克。该成果于18日晚在国际权威期刊《自然—机器智能》上在线发表。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

图为处于地面运动模式下的微型无线陆空两栖机器人(清华团队提供)
让机器人不仅能进行走、跑、跳、飞、爬等动作,还能随时固定任意形态,是实现机器人应用场景多样化的关键。据悉,目前5厘米以下的小尺寸驱动器通常难以同时实现连续的形状变化与构型锁定,这严重阻碍了具有多种运动模式的机器人向微型化与无线化发展。
基于材料与结构协同设计方法的创新,清华大学航天航空学院、柔性电子技术国家级重点实验室张一慧教授的课题组自主研制出最小至几毫米的微型驱动器,作为“可变形外骨骼”可用于集成传感器、电机等功能元器件,从而构建复杂的机器人系统。
“要让机器人既小又轻、无线控制,还具备复杂形态切换能力非常困难。”张一慧表示,新型驱动器具有优异的变形能力和锁定能力,通过电控制,可以实现连续变形至任意状态并将形态“锁定”——这是以往小尺寸驱动器难以实现的。利用这种驱动器组装的微型陆空两栖机器人通过变形,可以跑、可以飞,动作灵活,地面运动速度最高可达每秒1.6米。
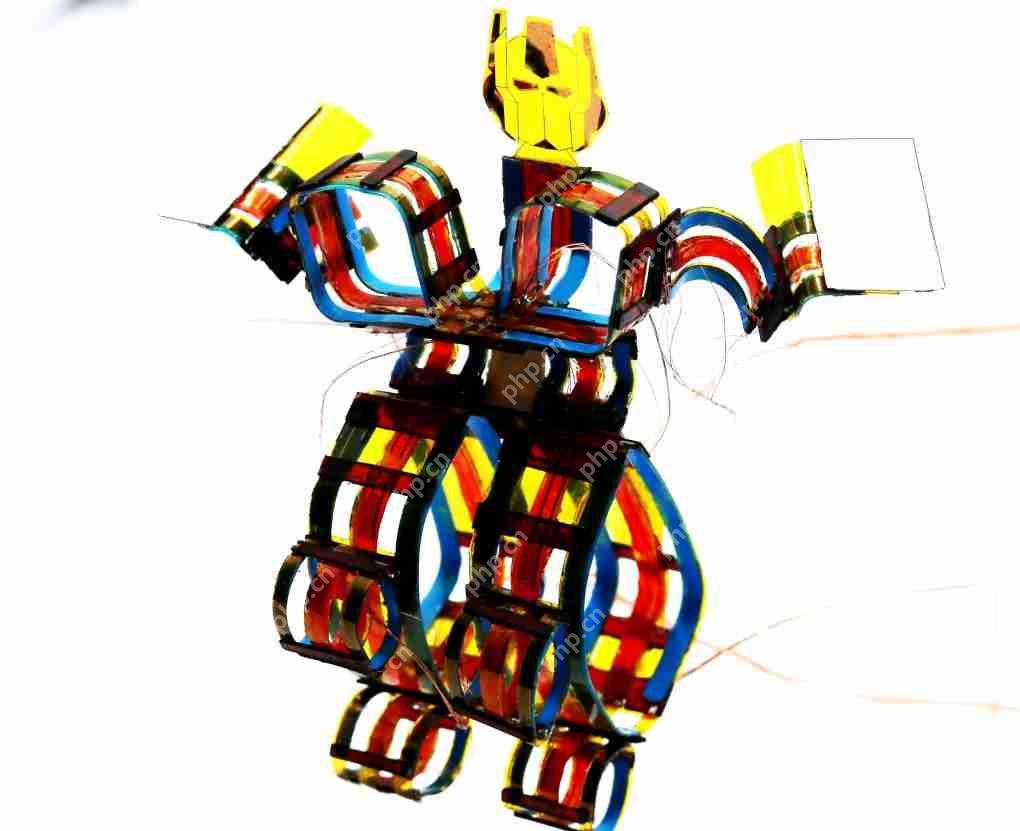
图为由多个驱动器单元构成的迷你版“变形金刚”(清华团队提供)
此外,团队还使用10多个驱动器制作了一款高4.5厘米、重仅0.8克的迷你版“变形金刚”。
张一慧表示,此次成果为微型机器人研发应用提供了新的思路和路径。未来,这种微型陆空两栖机器人可应用于设备故障诊断及检修、地质及文物勘探等场景,替代人类执行复杂危险环境下的多种任务。
以上就是我国科学家“搭积木”搭出9厘米微型无线陆空两栖机器人的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 388
388
























