







在嵌入式系统开发中,裸机编程和实时操作系统(rtos)是两种常见的方法。
裸机编程通过直接操作硬件提供最大控制权,适合资源受限的简单应用。
然而,随着系统复杂性增加,裸机代码的维护和扩展变得困难。
RTOS通过任务调度、通信和同步机制简化了多任务管理,特别适合需要实时性能或多功能协调的应用。

1
裸机编程
裸机编程是指在没有操作系统支持的情况下,直接与MCU硬件交互。
开发者通过操作内存映射的寄存器控制外设,通常采用“超级循环”结构,在主循环中顺序执行任务。
中断用于处理异步事件,如定时器溢出或外部输入。
int main(void) { init_hardware(); // 初始化硬件 while (1) { task1(); // 执行任务1 task2(); // 执行任务2 task3(); // 执行任务3 }}这种方法简单直接,但在多任务或实时场景下,任务调度和资源管理需手动实现,可能导致代码复杂且难以调试。
2
实时操作系统
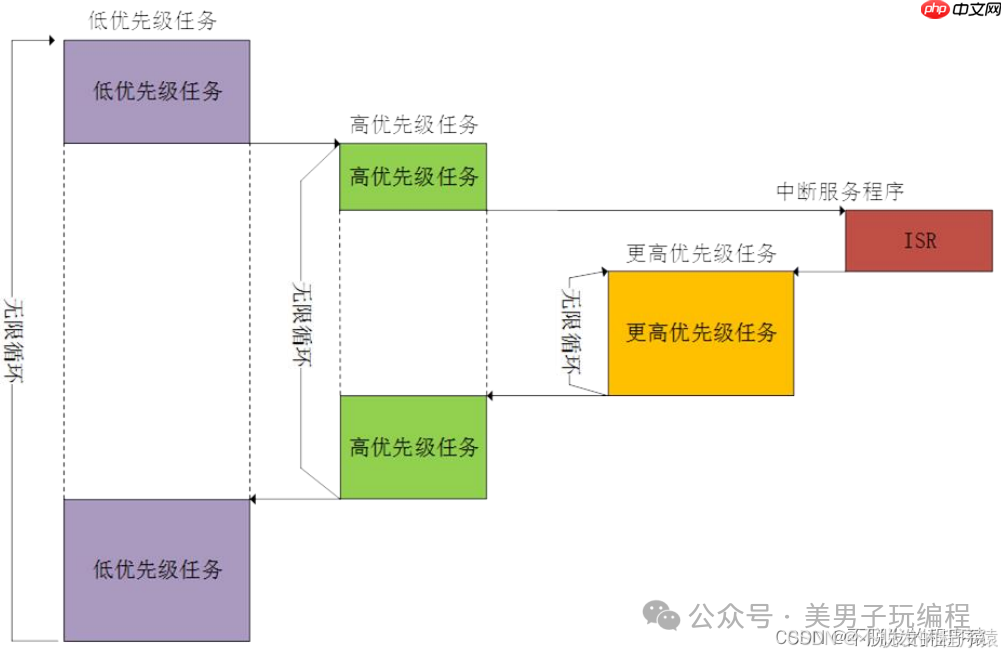
RTOS是为实时应用设计的操作系统,能够保证任务在指定时间内完成。
它通过任务管理、调度和通信原语支持多任务并发运行。
每个任务是一个独立的执行线程,拥有自己的堆栈和优先级,RTOS调度器根据优先级决定任务执行顺序。
移植到RTOS在以下场景中尤为有益:
复杂应用:系统需同时处理多个功能,如传感器数据采集、用户交互和通信。实时需求:任务有严格的时序要求,如工业控制或医疗设备。模块化开发:需要提高代码可维护性和可重用性。跨平台移植:RTOS的标准化API支持代码在不同MCU间迁移。然而,对于资源极度受限或功能简单的应用,裸机编程可能更合适。移植前需评估MCU的内存和处理能力,确保RTOS开销可接受。
选择RTOS时需考虑以下因素:
兼容性:确保RTOS支持目标MCU架构,如ARM Cortex-M。功能:检查是否提供所需功能,如队列、定时器等。文档与社区:丰富的文档和活跃的社区(如FreeRTOS社区)可加速开发。许可:了解开源或商业许可条款,FreeRTOS采用MIT许可,适合大多数项目。常见的RTOS包括FreeRTOS、uC/OS和Zephyr。本文以FreeRTOS为例,因其开源、支持广泛且易于集成。

3
移植裸机程序到RTOS的步骤步骤
步骤1:分析裸机代码首先,分析裸机代码的结构,识别以下元素:
主循环:确定循环中执行的功能模块,如传感器读取、数据处理。中断处理程序:记录所有ISR及其触发条件。功能模块:将代码分解为独立的功能单元,为后续任务设计做准备。例如,一个裸机程序可能包含传感器读取、LED控制和串口通信功能,这些可以映射为单独的任务。
步骤2:选择并设置RTOS环境选择FreeRTOS后,需完成以下设置:
从FreeRTOS官网下载最新内核。将核心文件(如FreeRTOS/Source/中的文件)集成到项目中,仅包含目标平台(如GCC/ARM_CM4)和内存管理(MemMang)相关代码。创建FreeRTOSConfig.h文件,配置参数如堆大小、时钟频率和功能开关。配置中断重定向宏,如vPortSVCHandler、xPortPendSVHandler等,确保RTOS正确处理系统中断。代码语言:javascript代码运行次数:0运行复制#define configUSE_PREEMPTION 1#define configCPU_CLOCK_HZ (SystemCoreClock)#define configTICK_RATE_HZ ((TickType_t)1000)步骤3:设计任务架构
将裸机代码的功能模块映射为RTOS任务,每个任务负责单一职责。需为每个任务分配优先级,优先级高的任务可抢占低优先级任务。
步骤4:实现任务间通信使用RTOS原语实现任务间通信和同步:
队列:用于任务间数据传递,如传感器数据。信号量:用于事件通知,如中断触发。互斥锁:保护共享资源,如外设访问。代码语言:javascript代码运行次数:0运行复制QueueHandle_t sensorQueue;// 传感器任务void sensorTask(void *pvParameters) { uint32_t data; while (1) { data = readSensor(); xQueueSend(sensorQueue, &data, portMAX_DELAY); vTaskDelay(pdMS_TO_TICKS(100)); }}// 处理任务void processTask(void *pvParameters) { uint32_t data; while (1) { if (xQueueReceive(sensorQueue, &data, portMAX_DELAY) == pdPASS) { processData(data); } }}步骤5:处理硬件交互确保任务安全访问硬件外设。如果多个任务访问同一外设,需使用互斥锁防止冲突。
代码语言:javascript代码运行次数:0运行复制SemaphoreHandle_t mutex;// 访问共享外设void accessPeripheral(void) { xSemaphoreTake(mutex, portMAX_DELAY); // 操作外设 xSemaphoreGive(mutex);}步骤6:测试和调试移植完成后,需全面测试以验证功能和性能:
功能测试:确保所有任务按预期运行。实时性测试:验证关键任务是否满足时序要求。资源冲突检查:使用调试工具(如JTAG或RTOS自带工具)监控任务调度和资源访问。常见问题包括:
优先级反转:调整任务优先级或使用优先级继承。死锁:检查互斥锁使用是否正确。栈溢出:增加任务栈大小或优化代码。建议采用增量移植,先将裸机主循环封装为单一任务,逐步拆分为多任务,确保每步可运行。
将裸机程序移植到RTOS是提升嵌入式系统性能和可维护性的有效方法。
通过分析裸机代码、设计任务架构、实现通信和测试,开发者可以构建模块化、实时性强的应用。
FreeRTOS等RTOS提供了强大的工具和社区支持,简化了移植过程。
无论你的项目涉及多传感器处理、通信接口还是实时控制,RTOS都能帮助您更高效地管理复杂性。
点击阅读原文,更精彩~




























