







当大数据浪潮席卷各个行业,控制理论也迎来了关键转折点:从依赖精确模型转向依赖海量数据。
然而,在数据驱动控制(datatic control)领域,长期缺乏一种统一、高效的数据表达规范。
为解决这一难题,清华大学李升波教授领导的iDLab课题组首次将经典控制理论中的“标准型”思想引入数据驱动范式,提出了一种全新的基于数据的系统描述方式——数据标准型。
每条数据样本由两部分构成:必需的转移信息与可灵活配置的属性模块,分别用于刻画系统的动态演化规律和承载人工定义的功能特征。
更进一步,这种数据结构支持根据具体算法需求定制附加属性,有效减少重复计算,显著提升控制器设计速度,为数据驱动控制的效率优化开辟了新路径。
该研究成果已被ACC2025录用发表。
从模型标准型到数据标准型
人工智能的飞速发展,离不开高质量数据的支持。
近年来,随着AI技术在各领域的渗透,以数据为核心的方法逐渐进入控制系统的设计流程。
控制方法正经历一场深刻变革:从传统的模型驱动控制(modelic control),逐步迈向数据驱动控制(datatic control)。
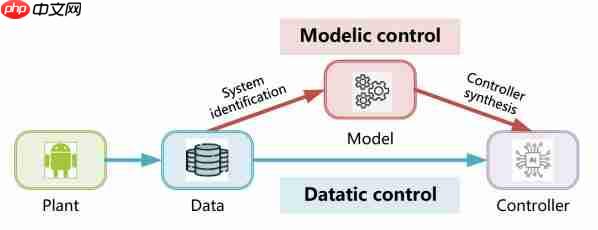
△图 1:两种控制范式的对比示意图
在模型驱动控制(上图路径)中,首先通过系统辨识建立数学模型,再基于该模型设计控制器;
而在数据驱动控制(下图路径)中,控制器直接由原始数据生成,跳过了建模环节。
在传统模型驱动框架下,“标准型”是极为重要的工具。
例如,控制理论奠基人鲁道夫·卡尔曼(Rudolf E. Kálmán)指出:若将状态空间模型表示为可控或可观标准型,则无需额外验证即可保证系统的可控性或可观性。
同样,数学家卡米耶·若尔当(Camille Jordan)提出的约旦标准型,可将系统矩阵转化为对角形式,其对角线元素即为系统特征值。
由此,仅需检查所有特征值是否具有负实部,便可快速判断系统稳定性。同时,不同特征值对应不同动态模态,有助于实现精准控制设计。
但在数据驱动控制范式中,是否存在类似的“标准型”?这是一个尚未被解答的问题。
随着机器人、自动驾驶等具身智能系统的兴起,系统交互过程中产生的数据量呈指数级增长。这些复杂、高维的数据给传统控制算法带来巨大压力,也催生了一个核心问题:
能否构建一种标准化的数据表达方式,使大规模数据能被高效利用?
答案正是本研究提出的数据标准型。
数据的组织形式直接影响后续算法的效率与扩展能力。
以强化学习为例,训练过程常涉及大量迭代和高维运算,容易陷入重复计算的困境——比如每次迭代都重新计算样本间的距离或相似度。
这类冗余操作不仅耗时,还严重消耗算力资源,限制了算法在实际场景中的部署。
因此,如何对数据进行高效、规范化的组织,避免重复计算、提升运行效率,成为数据驱动控制面临的关键挑战。
受模型标准型启发,该研究首次提出适用于数据驱动系统的标准数据结构(如图2所示):
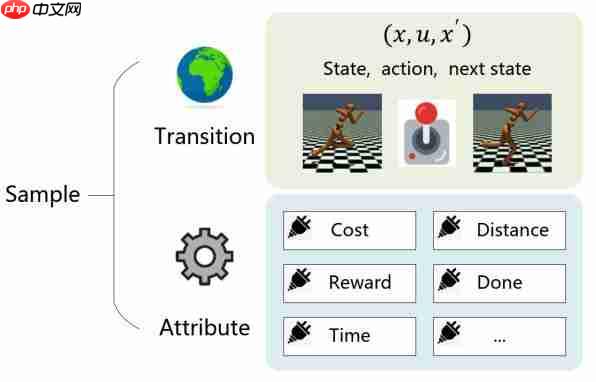
△图 2:数据标准型结构示意图
(1)转移部分:记录状态转移信息,包含系统动力学的关键数据;
(2)属性部分:可插拔模块,可根据算法需要预置奖励、特征编码等辅助信息。
前者为控制器设计提供必要基础,后者则按需启用,兼顾灵活性与存储效率,从而全面提升算法性能。
实验验证:加速近邻搜索
研究人员通过一个典型应用场景展示了数据标准型的优势。
在强化学习中,许多算法依赖回放缓冲区中的样本进行策略优化,常需执行“最近邻搜索”操作——例如比较当前策略行为与历史数据之间的差异:

由于需遍历整个数据集寻找最接近的样本,计算开销极大。

为此,研究团队提出一种空间属性预置机制:在数据标准型中引入一组预先设定的锚点(anchor points),并为每个样本提前计算其到各锚点的距离,作为可插拔的空间属性保存下来。
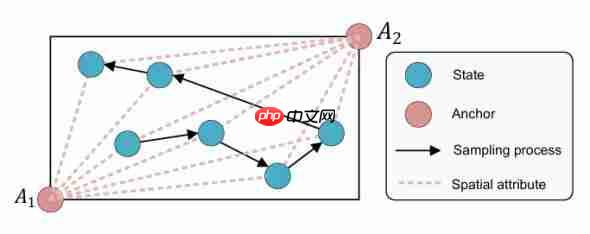
△图 3:空间属性构造示意图
基于此,研究提出了空间筛选条件定理,用于快速缩小候选样本范围。
定理 1(空间筛选条件)
设数据集中存在 n 个锚点,C 为目标样本,S 为任意其他样本。若 S 位于 C 的 R-邻域内,则必须满足以下条件:

其中 ∧ 表示逻辑与运算符。
利用该条件,只需一次判断指令即可排除大量无关样本,大幅压缩搜索空间。
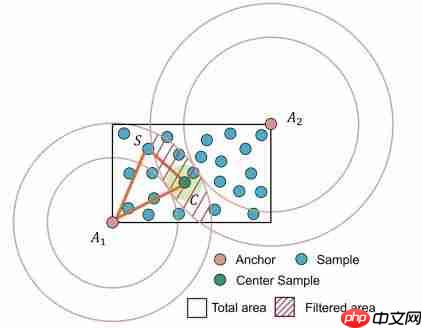
△图 4:空间筛选机制示意图
实验在D4RL数据集的Hopper任务中开展,对比使用空间标准型前后的训练时间。
结果如图5所示:原始版本(蓝色曲线)耗时约20小时,而引入空间标准型后(橙色曲线),训练时间缩短至7小时,提速近三倍。
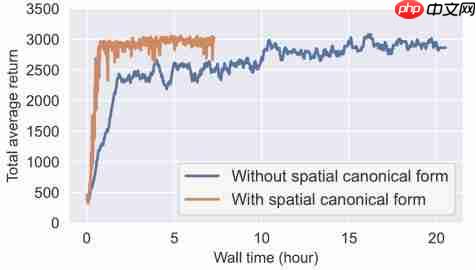
△图 5:训练时间对比图
由此可见,数据标准型以极小的存储代价,换取了显著的时间效率提升。
此外,其模块化设计允许按需启用属性字段,降低存储负担,具备良好的可扩展性,为未来数据驱动控制算法的发展提供了全新思路。
论文链接:https://www.php.cn/link/c1927a57de5c455d3bb1e6cdae59fab5
一键三连「点赞」「转发」「小心心」
欢迎在评论区分享你的看法!
— 完 —
点亮星标
科技前沿进展每日见





























