过去10年,“数字工厂”成为制造业的关键词。企业通过在产线上部署传感器,结合数据分析优化生产调度与质量控制,显著提升了效率。然而,尽管技术不断升级,工厂依旧保持着机械化、程序化的冰冷面貌。
“未来的工业智能将围绕‘物理智能’展开——即机器对环境的感知、理解与灵活操作能力。”ADI公司院士兼技术副总裁陈宝兴博士指出,“我们要赋予机器感知、连接、控制和解读的能力,让整个工厂演变为一个拥有思维、触觉与行动力的有机体。”
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

在线上演讲中,陈宝兴展示了一条清晰的技术演进时间线:从1950年图灵测试提出机器能否思考,到1956年达特茅斯会议正式开启人工智能时代,再到2012年深度学习取得突破、2022年大模型爆发,每一次里程碑都在推动机器向更高级的感知、认知与表达迈进。
“预计在2025至2030年间,人形机器人将真正走向现实。”他强调。曾经各自发展的AI、自动化与机器人技术,如今正加速融合,形成一个高度协同的超级生态系统。
这一判断背后,是三大趋势的交汇。
市场对柔性制造的需求日益增长,要求产线能快速切换产品;劳动力短缺问题在全球范围内加剧,工厂面临招工难困境;同时,AI算法的进步使机器人首次具备适应复杂环境的潜力。三者叠加,为人形机器人创造了前所未有的发展机遇。
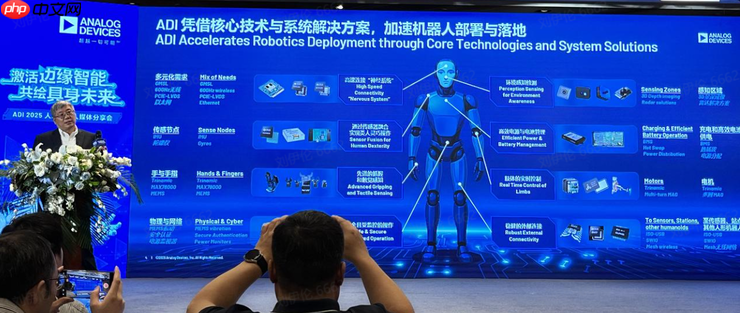
面对这一浪潮,ADI早已布局。
从帮助机器人“看见世界”的ToF摄像头模组,到支撑数据高速传输的GMSL与以太网方案,再到专为关节通信设计的60GHz无线通道,ADI构建了完整的感知-传输链条。IMU模块与触觉传感器如同机器人的“神经末梢”,而电机控制系统中的磁性编码器、位置传感器则精准掌控每一个动作细节。从“视觉”到“神经系统”,再到“肌肉驱动”,ADI正一步步推动人形机器人走出实验室,进入真实工厂场景。
灵巧手为何最难?低延迟、1克感知、高速互联成破局关键
“Optimus Gen3最大的挑战在于灵巧手的设计。”
首要难题是响应速度。人类依靠脊髓反射可在20-50毫秒内完成本能反应,而机器人要实现类似敏捷性,其控制环路总延迟必须压缩至10-20毫秒甚至更低。
其次,灵巧手需具备精细的力度控制与材质识别能力,这依赖高精度电机控制、高分辨率反馈系统以及灵敏的触觉传感技术支持。
而在感知与执行之间,信息传递的速度与可靠性尤为关键。
高速互连技术如同机器人的“神经网络”,确保指令与数据在体内畅通无阻。由于工业现场数据量庞大,机器人还需在本地边缘端与云端之间高效同步状态、共享经验。当前AI已支持“边云协同”模式,允许机器人实时上传操作数据,由云端分析并即时优化动作策略。
在看似流畅的动作背后,隐藏着对低延迟与高精度的极致追求:1毫秒响应的磁触觉阵列、可实时推理的边缘AI芯片、毫秒级通信链路——每一环都不可或缺。
精度方面,目前机器人角度检测精度约为±0.1-0.5度,运动控制误差在±1-2毫米,距离人类水平的±0.02-0.05度、0.01毫米仍有差距。即便是感知1克的压力变化或1毫米的位移,也是未来必须跨越的技术门槛。
为此,ADI开发出基于磁耦合原理的新型触觉传感器,采用弹性材料与磁电桥结构设计,具备防水、防尘、耐温差特性,实现了1克力的检测灵敏度和亚毫米级空间分辨率,突破了传统传感器的性能瓶颈。
要让人形机器人真正从“实验室走进车间”,离不开AI与物理智能的深度融合。
若将AI视为机器人的“大脑”,负责学习与决策,那么物理智能就是它的“身体”,通过传感器与执行器实现感知与行动。ADI正将其传感器与执行器模型接入NVIDIA Isaac Sim仿真平台,利用高保真数字孪生生成海量训练数据,破解工业场景下真实数据稀缺的困局,打通“仿真→现实”的闭环路径。
随着技术持续迭代,那些曾长期困于实验室的“灵巧手”,终将成为工厂中与人类协作的得力助手。
数据少、试错贵、落地慢?生态化开辟具身智能商业化新路径
走出实验室仅意味着技术可行,真正的挑战在于商业化落地。
当前AI与物理系统的融合仍显浅层,机器人在应对复杂工业任务时表现不足。例如,抓取不同重量物体需动态调节力度,但AI对物理世界的理解有限,缺乏足够的训练数据,导致泛化能力弱。
解决之道,在于构建开放的“生态体系”。
ADI的第一步,是联合产业链伙伴打造“数字孪生仿真平台”。公司将TMC控制器、多圈角度编码器、抗干扰磁耦合触觉传感器等核心器件的精确物理模型嵌入仿真系统,使机器人能在虚拟环境中提前完成动作调试与场景适配。
这就像为机器人提供一场“预演彩排”,不仅缓解了实际场景数据匮乏的问题,也大幅降低了下游厂商的试错成本——这是生态协同带来的第一重价值。
除了技术本身,商业化还受制于“落地节奏”。
因时机器人房海南表示,市场常期望机器人具备“通用能力”,但现阶段更应聚焦物流分拣等具体应用场景实现突破。
在ADI的生态蓝图中,并非只提供单点元器件,而是输出“全栈式解决方案”,满足不同阶段的落地需求。例如,在物流分拣场景中处理不规则物品时,ADI的ToF摄像头帮助机器人精准识别物体形态,GMSL高速接口保障图像数据实时回传,60GHz无线连接解决机械臂关节布线难题,配合低延迟边缘AI芯片,形成一条完整的“感知—决策—执行”技术链。客户无需自行整合碎片化技术,即可基于ADI方案快速部署应用,实现“拎包入住”式的高效落地。
当话题转向“成本控制”与“产业链协作”,ADI的生态逻辑更加清晰。
松延动力吴雅剑指出,核心零部件高昂的成本是制约量产的主要障碍。对此,ADI采取双管齐下的策略:一方面开放传感器与控制器的技术参数,支持上下游厂商规模化生产;另一方面,携手英伟达等合作伙伴,将ADI的硬件模型集成至IsaacSim平台,实现仿真数据跨平台复用,减少行业重复投入。
以ADI的磁耦合触觉传感器为例,其不仅自身具备环境鲁棒性,还能通过统一的技术标准适配多家厂商的灵巧手设计,既保证兼容性,又借助规模效应降低单位成本。
至于“哪个领域将率先爆发”,ADI已在多个方向提前卡位。
短期内,工业与物流场景对稳定算力与低延迟控制有强烈需求,ADI的以太网与ISO-USB连接技术可提供可靠支撑,目前已与多家物流设备商开展试点合作;中期来看,康养领域对触觉感知与精准操控要求极高,ADI的IMU模块与触觉传感器正与医疗企业合作开发助老护理机器人;长远而言,当服务机器人进入家庭生活,ADI计划依托“边云协同”架构,实现机器人行为数据的实时上传与云端优化。而这背后,是一个由ADI联合云服务商、AI算法公司共同构建的“数据—算法—硬件”闭环生态。
从核心技术攻坚,到场景化落地,再到成本优化与产业协同,ADI始终坚持一条主线:不亲自“造机器人”,而是以底层技术搭建开放平台,让产业链各方都能找到自己的角色——算法公司获得高精度物理模型,硬件厂商拥有标准化方案,终端用户则能按需选用适配产品。
这种“各展所长、互利共赢”的生态协作模式,或许正是破解人形机器人商业化难题的关键钥匙——当技术不再孤立,当产业形成合力,机器人从实验室走向工厂、融入日常生活的时代,已然到来。
以上就是灵巧手突破难、复杂数据稀缺,人形机器人如何突破量产「卡壳」?的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

 广告
广告Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 848
848