







全球首个在真实物理环境中由实体机器人执行、涵盖大规模多任务操作的基准测试平台 robochallenge 近日正式上线。
“我们的目标是打造一个面向真实世界的机器人测评体系。研究人员和开发者能够在统一标准下,对各类机器人策略进行验证与对比——从基础动作到高度复杂的现实场景应用。”
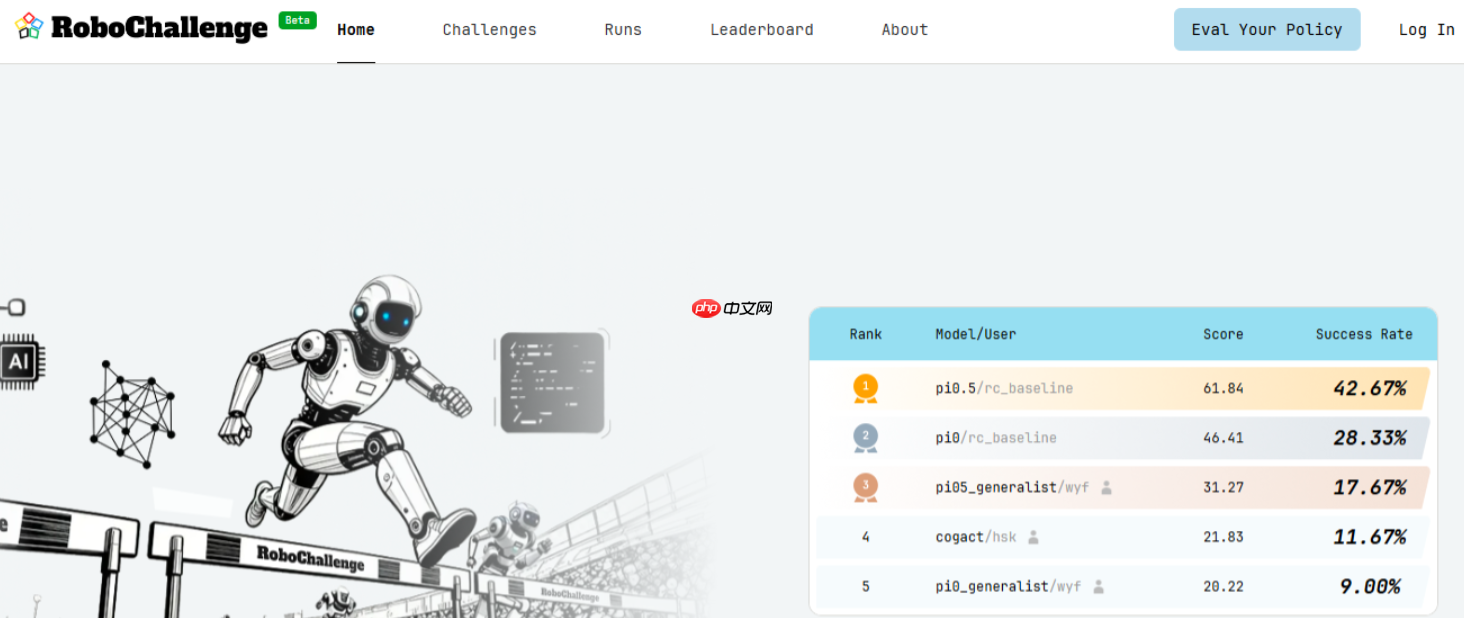
RoboChallenge 由 Dexmal 原力灵机与 Hugging Face 联合推出。该平台的核心意义在于突破了当前机器人评估领域在真实环境测试、标准化条件设定以及开放共享平台建设方面的多重瓶颈。
主要优势包括:
- 任务多样性:覆盖物体操控、环境交互及长期决策规划等多个层面,全面检验机器人智能水平。
- 兼容多种机器人形态:支持包括移动机器人、双臂机器人在内的多种硬件结构。
- 公开透明:所有测试结果与排行榜均实时公开,保障评估过程的公正性与可追溯性。
这一基准测试将为视觉语言动作模型(VLAs)在机器人领域的落地提供更可靠、更具可比性的评测依据,有力推动 VLA 模型从仿真训练向真实物理世界部署的转化进程。

























