







接着上篇《pytorch简明教程上篇》,继续学习多层感知机,卷积神经网络和lstmnet。
1、多层感知机
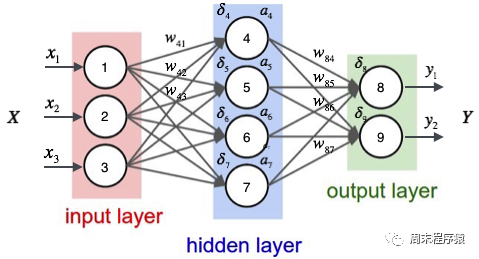
多层感知机是一种简单的神经网络,也是深度学习的重要基础。它通过在网络中添加一个或多个隐藏层来克服线性模型的限制。具体的图示如下:
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistdef build_model(input_dim, output_dim):return torch.nn.Sequential(torch.nn.Linear(input_dim, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, output_dim, bias=False),)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples, n_features = trX.size()n_classes = 10model = build_model(n_features, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.Adam(model.parameters())batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1)以上代码和单层神经网络的代码类似,区别是build_model构建一个包含三个线性层和两个ReLU激活函数的神经网络模型:
- 向模型中添加第一个线性层,该层的输入特征数量为input_dim,输出特征数量为512;
- 接着添加一个ReLU激活函数和一个Dropout层,用于增强模型的非线性能力和防止过拟合;
- 向模型中添加第二个线性层,该层的输入特征数量为512,输出特征数量为512;
- 接着添加一个ReLU激活函数和一个Dropout层;
- 向模型中添加第三个线性层,该层的输入特征数量为512,输出特征数量为output_dim,即模型的输出类别数量;
(2)什么是ReLU激活函数?ReLU(Rectified Linear Unit,修正线性单元)激活函数是深度学习和神经网络中常用的一种激活函数,ReLU函数的数学表达式为:f(x) = max(0, x),其中x是输入值。ReLU函数的特点是当输入值小于等于0时,输出为0;当输入值大于0时,输出等于输入值。简单来说,ReLU函数就是将负数部分抑制为0,正数部分保持不变。ReLU激活函数在神经网络中的作用是引入非线性因素,使得神经网络能够拟合复杂的非线性关系,同时,ReLU函数相对于其他激活函数(如Sigmoid或Tanh)具有计算速度快、收敛速度快等优点;
(3)什么是Dropout层?Dropout层是一种在神经网络中用于防止过拟合的技术。在训练过程中,Dropout层会随机地将一部分神经元的输出置为0,即"丢弃"这些神经元,这样做的目的是为了减少神经元之间的相互依赖,从而提高网络的泛化能力;
(4)print("Epoch %d, cost = %f, acc = %.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))最后打印当前训练的轮次,损失值和acc,上述的代码输出如下:
...Epoch 91, cost = 0.011129, acc = 98.45%Epoch 92, cost = 0.007644, acc = 98.58%Epoch 93, cost = 0.011872, acc = 98.61%Epoch 94, cost = 0.010658, acc = 98.58%Epoch 95, cost = 0.007274, acc = 98.54%Epoch 96, cost = 0.008183, acc = 98.43%Epoch 97, cost = 0.009999, acc = 98.33%Epoch 98, cost = 0.011613, acc = 98.36%Epoch 99, cost = 0.007391, acc = 98.51%Epoch 100, cost = 0.011122, acc = 98.59%
可以看出最后相同的数据分类,准确率比单层神经网络要高(98.59% > 97.68%)。
2、卷积神经网络
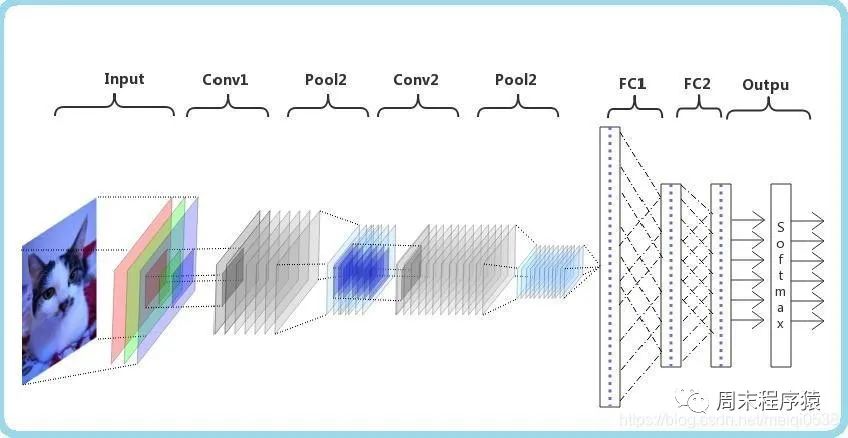
卷积神经网络(CNN)是一种深度学习算法。当输入一个矩阵时,CNN可以对其中的重要和不重要部分进行区分(分配权重)。相较于其他分类任务,CNN对数据预处理的要求并不高,只要经过充分的训练,就能够学习到矩阵的特征。下图展示了该过程:
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistclass ConvNet(torch.nn.Module):def __init__(self, output_dim):super(ConvNet, self).__init__()self.conv = torch.nn.Sequential()self.conv.add_module("conv_1", torch.nn.Conv2d(1, 10, kernel_size=5))self.conv.add_module("maxpool_1", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_1", torch.nn.ReLU())self.conv.add_module("conv_2", torch.nn.Conv2d(10, 20, kernel_size=5))self.conv.add_module("dropout_2", torch.nn.Dropout())self.conv.add_module("maxpool_2", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_2", torch.nn.ReLU())self.fc = torch.nn.Sequential()self.fc.add_module("fc1", torch.nn.Linear(320, 50))self.fc.add_module("relu_3", torch.nn.ReLU())self.fc.add_module("dropout_3", torch.nn.Dropout())self.fc.add_module("fc2", torch.nn.Linear(50, output_dim))def forward(self, x):x = self.conv.forward(x)x = x.view(-1, 320)return self.fc.forward(x)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = trX.reshape(-1, 1, 28, 28)teX = teX.reshape(-1, 1, 28, 28)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples = len(trX)n_classes = 10model = ConvNet(output_dim=n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1)以上代码定义了一个名为ConvNet的类,它继承自torch.nn.Module类,表示一个卷积神经网络,在__init__方法中定义了两个子模块conv和fc,分别表示卷积层和全连接层。在conv子模块中,我们定义了两个卷积层(torch.nn.Conv2d)、两个最大池化层(torch.nn.MaxPool2d)、两个ReLU激活函数(torch.nn.ReLU)和一个Dropout层(torch.nn.Dropout)。在fc子模块中,定义了两个线性层(torch.nn.Linear)、一个ReLU激活函数和一个Dropout层;
池化层在CNN中扮演着重要的角色,其主要目的有以下几点:
《微厦在线学习考试系统》将“ 视频学习、试题练习、在线考试 ”紧密相联,打造成为集 “学、练、考” 于一体的在线学习系统。“点播/直播”、“刷题/测试”、“组卷/考试”,根据学习内容的不同权重汇总综合成绩,生成学习证明。支持在线支付(微信支付、支付宝支付);利用充值卡、学习卡配合线下营销;Web端、APP、小程序,多终端方便学习。适用:大学、中职中专、培训机构、企事业单位行业:企业内训、成人教育、
- 降低维度:池化层通过对输入特征图(Feature maps)进行局部区域的下采样操作,降低了特征图的尺寸。这样可以减少后续层中的参数数量,降低计算复杂度,加速训练过程;
- 平移不变性:池化层可以提高网络对输入图像的平移不变性。当图像中的某个特征发生小幅度平移时,池化层的输出仍然具有相似的特征表示。这有助于提高模型的泛化能力,使其能够在不同位置和尺度下识别相同的特征;
- 防止过拟合:通过减少特征图的尺寸,池化层可以降低模型的参数数量,从而降低过拟合的风险;
- 增强特征表达:池化操作可以聚合局部区域内的特征,从而强化和突出更重要的特征信息。常见的池化操作有最大池化(Max Pooling)和平均池化(Average Pooling),分别表示在局部区域内取最大值或平均值作为输出;
(3)print("Epoch %d, cost = %f, acc = %.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))最后打印当前训练的轮次,损失值和acc,上述的代码输出如下:
...Epoch 91, cost = 0.047302, acc = 99.22%Epoch 92, cost = 0.049026, acc = 99.22%Epoch 93, cost = 0.048953, acc = 99.13%Epoch 94, cost = 0.045235, acc = 99.12%Epoch 95, cost = 0.045136, acc = 99.14%Epoch 96, cost = 0.048240, acc = 99.02%Epoch 97, cost = 0.049063, acc = 99.21%Epoch 98, cost = 0.045373, acc = 99.23%Epoch 99, cost = 0.046127, acc = 99.12%Epoch 100, cost = 0.046864, acc = 99.10%
可以看出最后相同的数据分类,准确率比多层感知机要高(99.10% > 98.59%)。
3、LSTMNet
LSTMNet是使用长短时记忆网络(Long Short-Term Memory, LSTM)构建的神经网络,核心思想是引入了一个名为"记忆单元"的结构,该结构可以在一定程度上保留长期依赖信息,LSTM中的每个单元包括一个输入门(input gate)、一个遗忘门(forget gate)和一个输出门(output gate),这些门的作用是控制信息在记忆单元中的流动,以便网络可以学习何时存储、更新或输出有用的信息。
import numpy as npimport torchfrom torch import optim, nnfrom data_util import load_mnistclass LSTMNet(torch.nn.Module):def __init__(self, input_dim, hidden_dim, output_dim):super(LSTMNet, self).__init__()self.hidden_dim = hidden_dimself.lstm = nn.LSTM(input_dim, hidden_dim)self.linear = nn.Linear(hidden_dim, output_dim, bias=False)def forward(self, x):batch_size = x.size()[1]h0 = torch.zeros([1, batch_size, self.hidden_dim])c0 = torch.zeros([1, batch_size, self.hidden_dim])fx, _ = self.lstm.forward(x, (h0, c0))return self.linear.forward(fx[-1])def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)train_size = len(trY)n_classes = 10seq_length = 28input_dim = 28hidden_dim = 128batch_size = 100epochs = 100trX = trX.reshape(-1, seq_length, input_dim)teX = teX.reshape(-1, seq_length, input_dim)trX = np.swapaxes(trX, 0, 1)teX = np.swapaxes(teX, 0, 1)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)model = LSTMNet(input_dim, hidden_dim, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)for i in range(epochs):cost = 0.num_batches = train_size // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[:, start:end, :], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%" %(i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1)以上这段代码通用的部分就不解释了,具体说LSTMNet类:
- self.lstm = nn.LSTM(input_dim, hidden_dim)创建一个LSTM层,输入维度为input_dim,隐藏层维度为hidden_dim;
- self.linear = nn.Linear(hidden_dim, output_dim, bias=False)创建一个线性层(全连接层),输入维度为hidden_dim,输出维度为output_dim,并设置不使用偏置项(bias);
- h0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的隐藏状态h0,全零张量,形状为[1, batch_size, hidden_dim];
- c0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的细胞状态c0,全零张量,形状为[1, batch_size, hidden_dim];
- fx, _ = self.lstm.forward(x, (h0, c0))将输入数据x以及初始隐藏状态h0和细胞状态c0传入LSTM层,得到LSTM层的输出fx;
- return self.linear.forward(fx[-1])将LSTM层的输出传入线性层进行计算,得到最终输出。这里fx[-1]表示取LSTM层输出的最后一个时间步的数据;
(2)print("第%d轮,损失值=%f,准确率=%.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))。打印出当前训练轮次的信息,其中包括损失值和准确率,以上代码的输出结果如下:
Epoch 91, cost = 0.000468, acc = 98.57%Epoch 92, cost = 0.000452, acc = 98.57%Epoch 93, cost = 0.000437, acc = 98.58%Epoch 94, cost = 0.000422, acc = 98.57%Epoch 95, cost = 0.000409, acc = 98.58%Epoch 96, cost = 0.000396, acc = 98.58%Epoch 97, cost = 0.000384, acc = 98.57%Epoch 98, cost = 0.000372, acc = 98.56%Epoch 99, cost = 0.000360, acc = 98.55%Epoch 100, cost = 0.000349, acc = 98.55%
4、辅助代码
两篇文章的from data_util import load_mnist的data_util.py代码如下:
import gzip
import os
import urllib.request as request
from os import path
import numpy as np
DATASET_DIR = 'datasets/'
MNIST_FILES = ["train-images-idx3-ubyte.gz", "train-labels-idx1-ubyte.gz", "t10k-images-idx3-ubyte.gz", "t10k-labels-idx1-ubyte.gz"]
def download_file(url, local_path):
dir_path = path.dirname(local_path)
if not path.exists(dir_path):
print("创建目录'%s' ..." % dir_path)
os.makedirs(dir_path)
print("从'%s'下载中 ..." % url)
request.urlretrieve(url, local_path)
def download_mnist(local_path):
url_root = "http://yann.lecun.com/exdb/mnist/"
for f_name in MNIST_FILES:
f_path = os.path.join(local_path, f_name)
if not path.exists(f_path):
download_file(url_root + f_name, f_path)
def one_hot(x, n):
if type(x) == list:
x = np.array(x)
x = x.flatten()
o_h = np.zeros((len(x), n))
o_h[np.arange(len(x)), x] = 1
return o_h
def load_mnist(ntrain=60000, ntest=10000, notallow=True):
data_dir = os.path.join(DATASET_DIR, 'mnist/')
if not path.exists(data_dir):
download_mnist(data_dir)
else:
# 检查所有文件
checks = [path.exists(os.path.join(data_dir, f)) for f in MNIST_FILES]
if not np.all(checks):
download_mnist(data_dir)
with gzip.open(os.path.join(data_dir, 'train-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trX = loaded[16:].reshape((60000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 'train-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trY = loaded[8:].reshape((60000))
with gzip.open(os.path.join(data_dir, 't10k-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teX = loaded[16:].reshape((10000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 't10k-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teY = loaded[8:].reshape((10000))
trX /= 255.
teX /= 255.
trX = trX[:ntrain]
trY = trY[:ntrain]
teX = teX[:ntest]
teY = teY[:ntest]
if onehot:
trY = one_hot(trY, 10)
teY = one_hot(teY, 10)
else:
trY = np.asarray(trY)
teY = np.asarray(teY)
return trX, teX, trY, teY



























