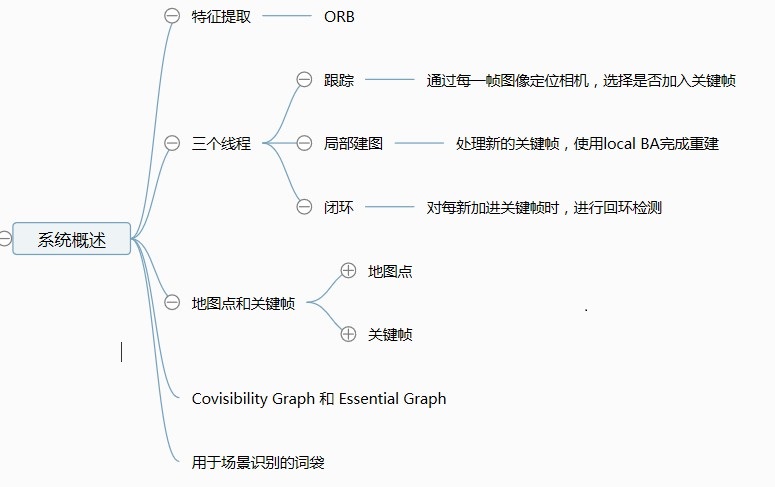
orb-slam主要分为三个线程进行:tracking、localmapping和loopclosing
三个线程分别存放在对应的三个文件中,分别是Tracking.cpp、LocalMapping.cpp和LoopClosing.cpp文件中。
(1)跟踪(Tracking)
这一部分主要工作是从图像中提取ORB特征,根据上一帧进行姿态估计,或者进行通过全局重定位初始化位姿,然后跟踪已经重建的局部地图,优化位姿,再根据一些规则确定新的关键帧。
(2)建图(LocalMapping)
这一部分主要完成局部地图构建。包括对关键帧的插入,验证最近生成的地图点并进行筛选,然后生成新的地图点,使用局部捆集调整(Local BA),最后再对插入的关键帧进行筛选,去除多余的关键帧。
(3)闭环检测(LoopClosing)
这一部分主要分为两个过程,分别是闭环探测和闭环校正。闭环检测先使用WOB进行探测,然后通过Sim3算法计算相似变换。闭环校正,主要是闭环融合和Essential Graph的图优化。
以上就是ORB-SLAM2初学笔记的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 885
885