
点云目标识别技术是三维环境智能感知与理解的关键技术之一,广泛应用于自动驾驶、无人系统和空间探测等领域。然而,实际环境中的传感器噪声和环境干扰等因素常常导致点云数据出现扰动、缺失和变形等问题,显著降低了传统识别方法的准确性和泛化能力。针对复杂环境下点云目标智能识别的科学挑战,许廷发和李佳男的科研团队进行了创新性研究和技术攻关,取得了重大突破。他们的研究成果已在ieee tpami、neurips (ccf-a)、iccv (ccf-a)和iclr等顶级人工智能期刊和会议上发表,引起了学术界的广泛关注。
该团队从点云数据增强、特征学习和时序建模三个方面进行了系统性研究,提出了以下创新方法和技术:
1.样本自适应在线数据扩增方法(IEEE TPAMI 2025):该方法结合输入点云的空间结构特征和感知模型状态,自适应地对样本施加多级变形和遮挡,生成接近真实失真场景的点云数据,从而扩展训练样本的多样性,显著提升模型的鲁棒性(图1)。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

图1. 样本自适应在线扩增方法示意图。
2.基于对抗学习的点云模式捕获策略(NeurIPS 2024):该策略在训练阶段引入对抗性特征擦除机制,遮蔽模型已学习的目标模式,迫使模型从目标的其他区域挖掘更具判别性的特征,从而增强对点云全局结构的感知能力(图2)。
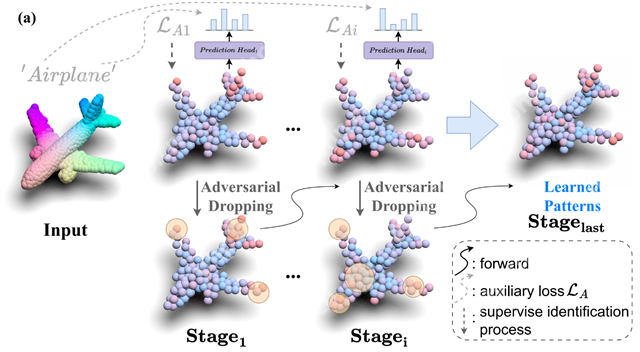
图2. 基于对抗学习的点云模式捕获策略。
3.时序关联高效建模框架(ICLR 2025):该框架通过关联机制将输入点云帧与捕捉到的时序动态信息相融合,提取深度运动线索并对整个序列的时序特征进行统一建模,有效降低计算冗余,显著提高了处理效率(图3)。

图3. 不同模型精度与速度的性能对比。
通过这些研究,团队构建了面向复杂环境的点云目标鲁棒识别一体化技术架构,成功突破了点云数据高效扩增、精细化特征表达以及运动特征高效挖掘等关键技术瓶颈。提出的系列方法显著提升了点云识别模型在失真条件下的鲁棒性和泛化性能,并大幅提高了识别效率。
这些研究成果提升了复杂环境下点云感知技术的可靠性和实用性,为无人系统自主导航和空间目标感知等领域的实际应用提供了重要的理论基础和技术支持。
以上就是北理工团队在点云目标智能识别领域取得系列突破性进展的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 985
985























