大家好,又见面了,我是你们的朋友全栈君。
2018年已经举办过一年了,2019年在ICCV上举办。
我们鼓励参与者使用每项任务提供的训练数据,但也允许他们使用额外的训练数据。在上传结果到服务器时,必须在“方法描述”中注明使用了额外的训练数据。
我们强调,任何形式的标注或使用VisDrone测试集进行监督或无监督训练都是严格禁止的。参与者必须在提交时明确指定在“方法描述”中使用的所有外部训练数据。此外,参与者不得使用其他任务的训练或验证集来训练某一任务的模型。
我们已将测试集分为两个部分,包括test-challenge和test-dev。test-dev每天可以提交3次,test-challenge总共可以提交3次。
不明白为什么download里的test-dev是不能下载的。。。
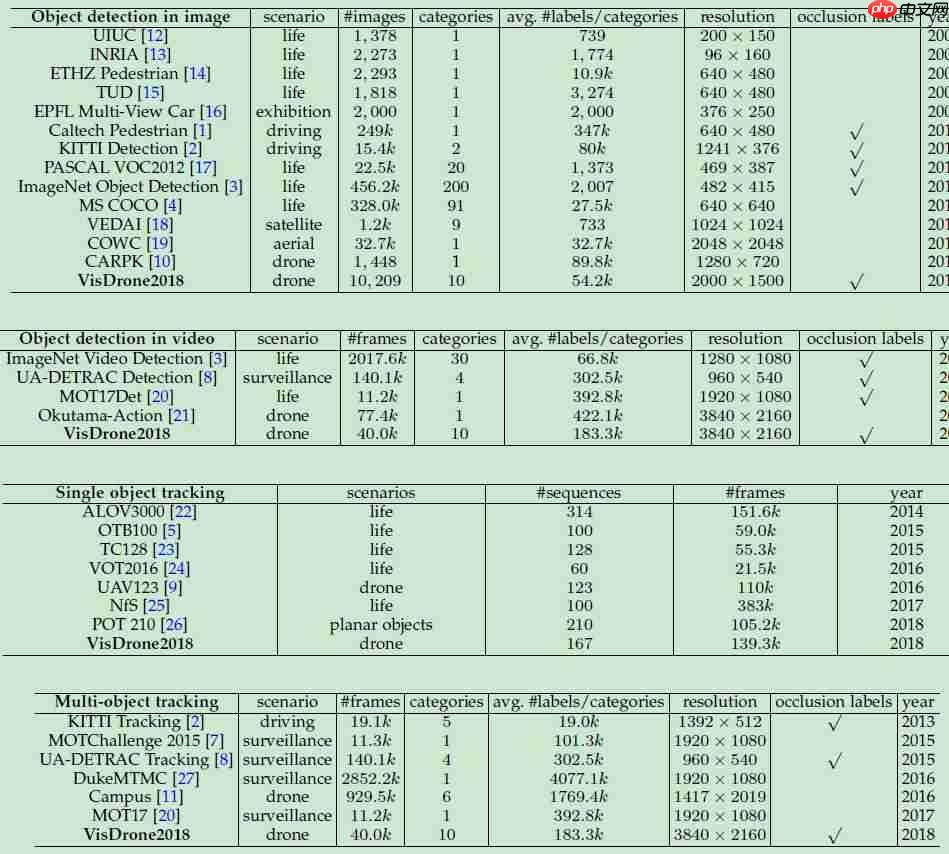
视觉与无人机:挑战摘要我们的基准测试包含超过250万个标注实例,分布在179,264张图像/视频帧中。
引言现状:缺乏大型数据集。
我们仔细标注了这些类别中的超过250万个目标实例的边界框。此外,为了更好地使用数据,还提供了包括场景可见性、目标类别和遮挡等重要属性。
 感觉数据量还是挺大的,也没什么别的数据集可以利用了。
感觉数据量还是挺大的,也没什么别的数据集可以利用了。
3.2 任务1:图像中的目标检测VisDrone2018为此任务提供了10,209张图像的数据集,其中6,471张用于训练,548张用于验证,3,190张用于测试。
对于截断比例,它用于指示目标部分出现在帧外的程度。如果一个目标未完全捕捉在帧内,我们会在帧边界上标注边界框,并根据图像外的区域估计截断比例。值得注意的是,如果一个目标的截断比例大于50%,在评估过程中将被跳过。
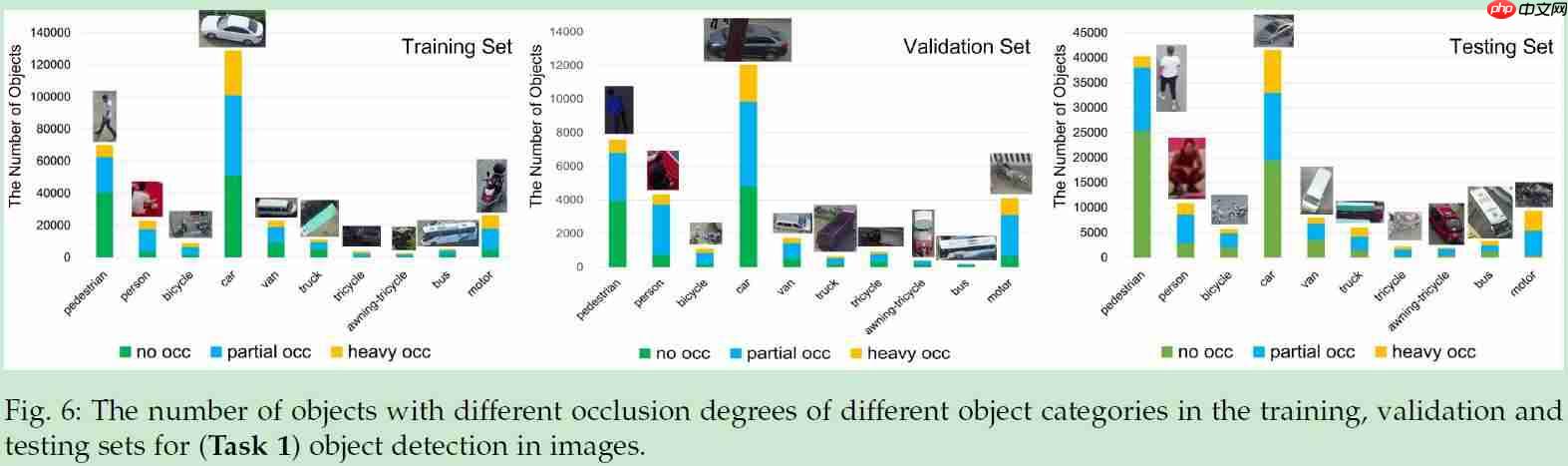 任务1 遮挡情况
任务1 遮挡情况
三种遮挡程度:无遮挡(遮挡比例0%)、部分遮挡(遮挡比例1%到50%)、重度遮挡(遮挡比例大于50%)。
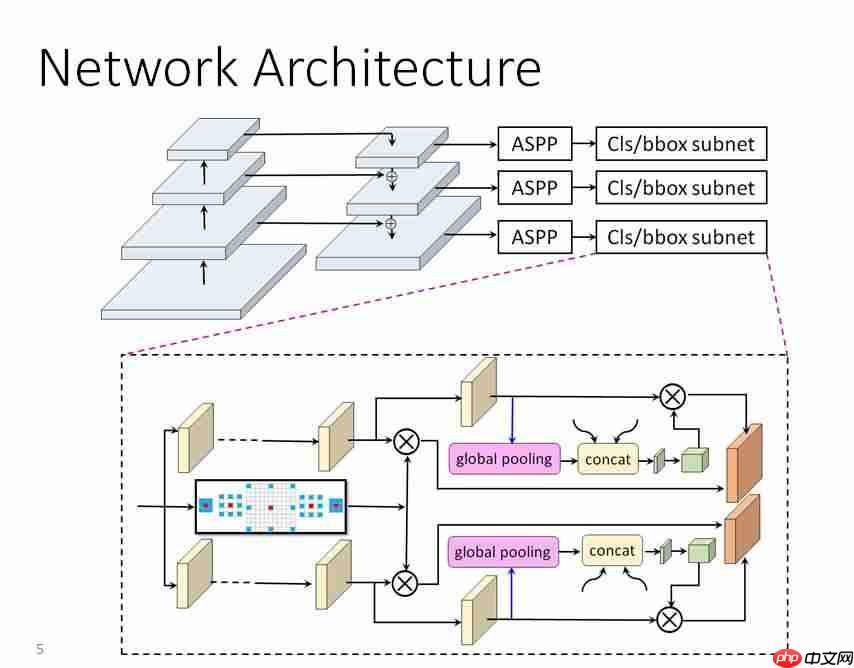
2018年任务1的获胜者选择了RetinaNet,去除了后两层,只使用了P3、P4、P5。
 数据分布
数据分布
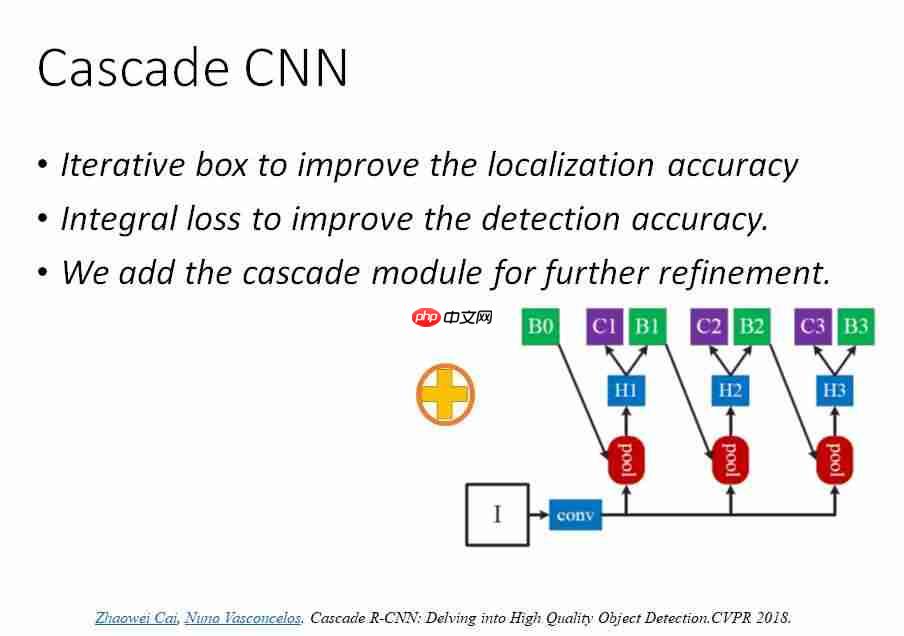
 Cascade R-CNN:深入研究高质量目标检测
Cascade R-CNN:深入研究高质量目标检测
单次双向金字塔网络用于高质量目标检测
数据观察任务1边界框观察 数据分布
| p2 | p3 | p4 | p5 | p6 | >p6 | |
|---|---|---|---|---|---|---|
| train | 48.3% | 30.6% | 16.2% | 4.4% | 0.5% | 0.01% |
| val | 55.3% | 30.8% | 11.4% | 2.4% | 0.1% | 0.007% |
| train_val | 49.0% | 30.6% | 15.7% | 4.1% | 0.5% | 0.01% |
| p2 | p3 | p4 | p5 | p6 | >p6 | |
|---|---|---|---|---|---|---|
| train | 28.2% | 34.6% | 24.5% | 10.5% | 2.0% | 0.1% |
| val | 33.0% | 37.6% | 21.8% | 6.9% | 0.7% | 0.03% |
| train_val | 28.7% | 34.9% | 24.2% | 10.2% | 1.9% | 0.1% |
| p2 | p3 | p4 | p5 | p6 | >p6 | |
|---|---|---|---|---|---|---|
| train | 6.2% | 22.0% | 34.6% | 24.5% | 10.6% | 2.0% |
| val | 7.1% | 26.0% | 37.6% | 21.8% | 6.9% | 0.7% |
| train_val | 6.3% | 22.4% | 34.9% | 24.2% | 10.2% | 1.9% |
类别分布
| 0 ignored | 1 pedestrain | 2 people | 3 bicycle | 4 car | 5 van | 6 truck | 7 tricycly | 8 awning-tricycle | 9 bus | 10 motor | 11 others | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| train | 2.49% | 22.44% | 7.65% | 2.96% | 40.97% | 7.06% | 3.64% | 1.36% | 0.92% | 1.68% | 8.39% | 0.43% |
| val | 3.43% | 22.02% | 12.76% | 3.24% | 35.01% | 4.92% | 1.87% | 2.60% | 1.32% | 0.62% | 12.16% | 0.08% |
| trian_val | 2.59% | 22.40% | 8.17% | 2.99% | 40.37% | 6.84% | 3.46% | 1.49% | 0.96% | 1.57% | 8.77% | 0.40% |
| 0 ignored | 1 pedestrain | 2 people | 3 bicycle | 4 car | 5 van | 6 truck | 7 tricycly | 8 awning-tricycle | 9 bus | 10 motor | 11 others | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| train | 3.89% | 6.42% | 1.82% | 1.45% | 54.11% | 11.66% | 9.46% | 1.39% | 1.07% | 4.69% | 3.35% | 0.69% |
| val | 8.23% | 7.44% | 3.67% | 1.42% | 54.88% | 7.68% | 5.80% | 2.38% | 1.29% | 1.82% | 5.23% | 0.15% |
| trian_val | 4.18% | 6.49% | 1.94% | 1.45% | 54.16% | 11.39% | 9.22% | 1.46% | 1.09% | 4.50% | 3.47% | 0.65% |
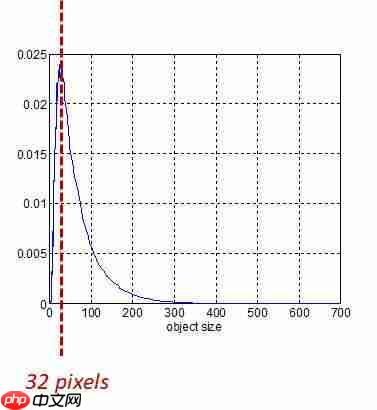
图片尺寸分布
| 480×360 | 960×540 | 1344×756 | 1360×765 | 1389×1042 | 1398×1048 | 1400×788 | 1400×1050 | 1916×1078 | 1920×1080 | 2000×1500 | all | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| train | 1 | 250 | 1 | 743 | 1 | 30 | 1299 | 2498 | 537 | 339 | 772 | 6462 |
| val | 0 | 121 | 0 | 408 | 0 | 0 | 0 | 0 | 0 | 19 | 0 | 548 |
| test | 0 | 64 | 0 | 150 | 0 | 0 | 712 | 491 | 127 | 36 | 0 | 1580 |
train 平均图像大小:1575738.0529247911
b0说任务2中同一个物体的类别会变。Pyramid Scene Parsing Network发布者:全栈程序员栈长,转载请注明出处:https://www.php.cn/link/c8ad39b9579b4816dc8f6f805c190308
以上就是无人机视觉定位是怎么回事_drone无人机怎么下APP的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 100
100