
北京理工大学科研团队发布国际首个复杂环境自动驾驶双4d毫米波雷达数据集dual radar,为自动驾驶感知算法研究提供了宝贵资源。该数据集采集了超过400公里真实道路数据,包含超过10000帧同步标注数据,涵盖了多种复杂场景,例如不同天气(晴天、阴天、雨天)、光照条件(正常光照、逆光)、道路类型(城市道路、隧道)以及时间段(白天、黄昏、夜晚)。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
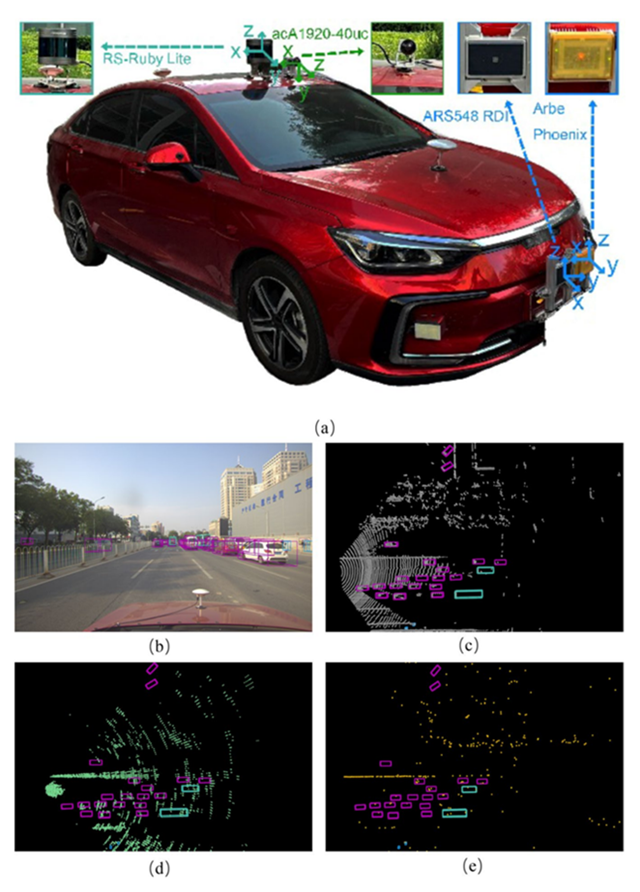
图1:Dual Radar数据采集车辆及传感器数据示例
Dual Radar数据集的核心在于使用了两种不同类型的4D毫米波雷达:Arbe Phoenix和ARS548 RDI。Arbe Phoenix雷达视野广,点云密度高,但噪声也相对较大;ARS548 RDI雷达噪声低,长距离探测精度高,但点云密度较低。 这两种雷达的互补特性,使得Dual Radar数据集能够更全面地评估自动驾驶感知算法在不同点云密度和噪声水平下的性能。
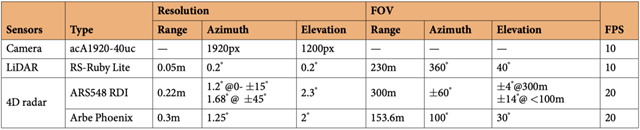
表1:车载传感器参数
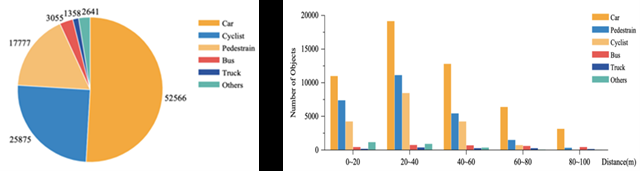
图2:目标类别数量及距离分布
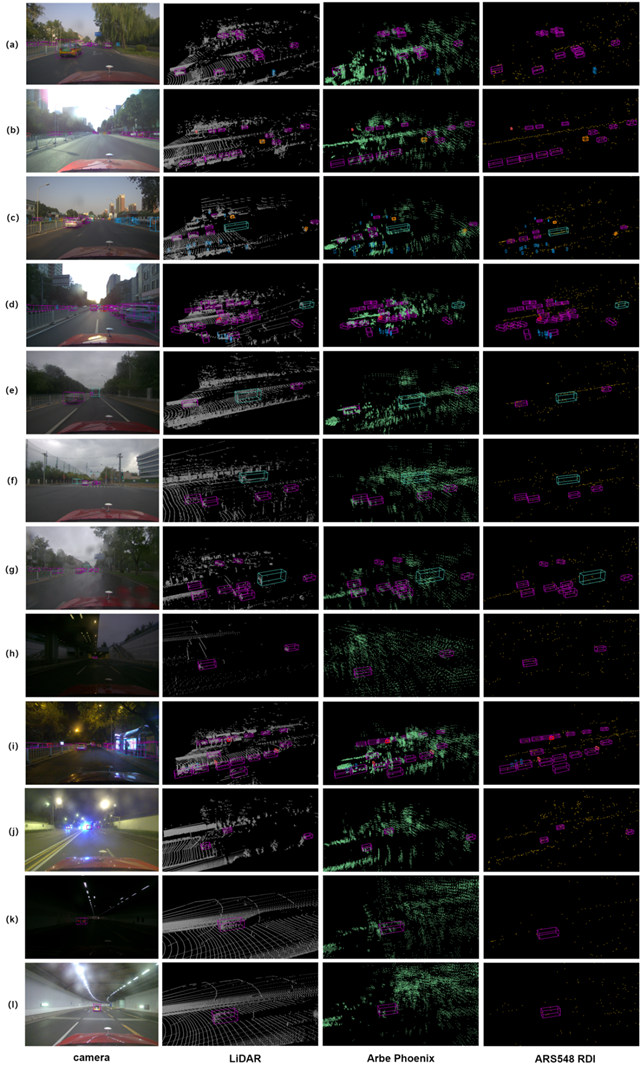
图3:三维目标检测标注示例
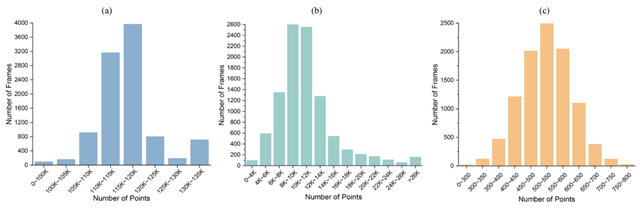
图4:不同传感器点云数量统计
该数据集包含汽车、行人、自行车、公交车、卡车等多种目标类别,并提供了详细的三维目标检测和跟踪标注。 研究团队相信,Dual Radar数据集能够有效推动自动驾驶感知算法在复杂和极端环境下的发展,提升自动驾驶系统的安全性与可靠性,最终促进自动驾驶技术的进步。 数据集已公开发布,方便全球研究人员进行算法测试和改进。
以上就是北理工团队在复杂环境自动驾驶数据集建设方面取得重要成果的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 992
992






















