
thaker nayl博士于2013年在瑞典lulea university of technology获得硕士学位,硕士论文题为《modeling, control and path planning for an articulated vehicle》。2015年,他在同一所大学获得博士学位,博士论文题为《on autonomous articulated vehicles》。目前,nayl博士任教于伊拉克的university of information technology & communications。
Nayl博士最早在Google学术等数据库中出现的文章是《Kinematic modeling and simulation studies of a LHD vehicle under slip angles》,这表明他一直致力于铰接式车辆领域的研究。
在Google学术上,Nayl博士的影响力如下:
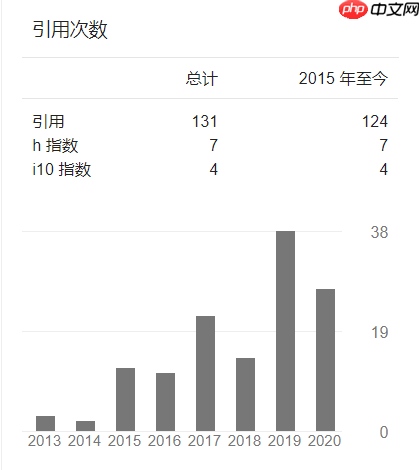
Nayl博士的代表作(目前被引量前十)包括:
上述论文中,《Switching model predictive control for an articulated vehicle under varying slip angle》、《A full error dynamics switching modeling and control scheme for an articulated vehicle》、《Modeling, control and path planning for an articulated vehicle》、《Design and experimental evaluation of a novel sliding mode controller for an articulated vehicle》、《Path following for an articulated vehicle based on switching model predictive control under varying speeds and slip angles》均涉及路径跟踪研究。
总体来看,Nayl博士专注于铰接式车辆的路径跟踪、建模和路径规划研究,擅长使用基于误差预测模型的线性模型预测控制和滑模控制等方法。对于从事路径跟踪控制研究,尤其是铰接式车辆路径跟踪控制的同行,Nayl博士的研究具有较高的参考价值。
PS:由于家中有事,更新晚了,抱歉。
以上就是学者小传—— Thaker Nayl的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

 广告
广告


Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 247
247



















