本文介绍多目标跟踪中二分图匹配的匈牙利算法与KM算法。先解释完美匹配、二分图、最大匹配、交错路径等概念,以男女配对为例,演示匈牙利算法流程:通过匹配与寻找增广路径交替操作实现最大匹配,并附代码及输入输出说明,展示算法如何解决二分图无权匹配问题。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
目标检测任务是计算机视觉中的核心问题之一,而不同目标检测模型的性能很大程度上取决于损失函数的设计。以YOLO系列举例,一般YOLO系列的输出头都包含Regression和Classification两部分。
故以YOLO系列为例,目标检测的损失就包含了三部分,而今天要介绍的SIoU则属于第一类损失,回归框损失 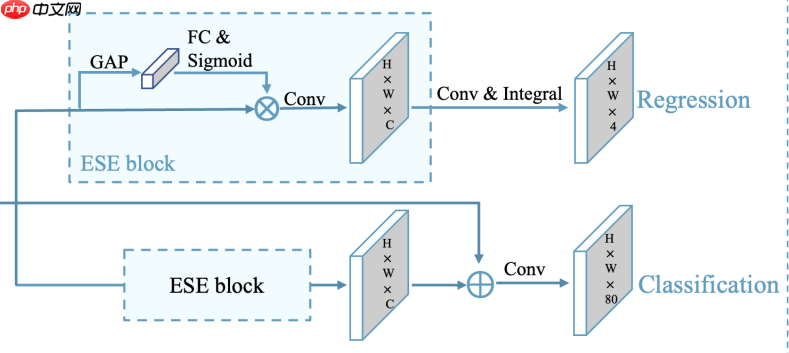
正如标题所说,SIoU是一种对于目标框回归有更强大学习能力的损失函数,但其表现的强大在哪呢,要先回顾一下传统的GIOU和CIOU。
传统的回归框损失主要从三个方面进行考虑,即两框的重叠区域,两框之间的距离和两框的长宽比例。(上面说的两框均值真实框与预测框)
重叠区域的表示:大部分算法都以IOU的形式来表达,即通过计算真实框与预测框之间的交集和并集的比来表示。即下图黄色面积和蓝色面积的比值来表示IOU。
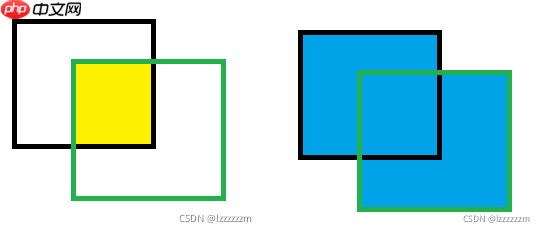
但上图所表示的IOU,最大的问题在于没有办法解决两框没有交集的情况,而这其实在目标检测的训练中是常常出现的。所以就有了GIOU的表示方法。
GIOU引入了两个方框中最小外接矩形的概念,来解决两个方框不相交的问题。
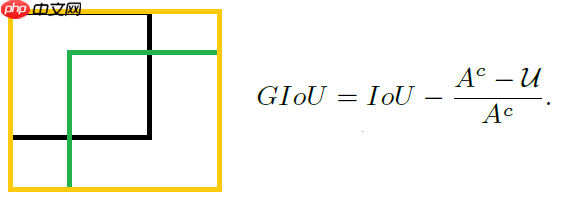
上式中Ac为下图黄色框的面积,u为两框相交的面积。
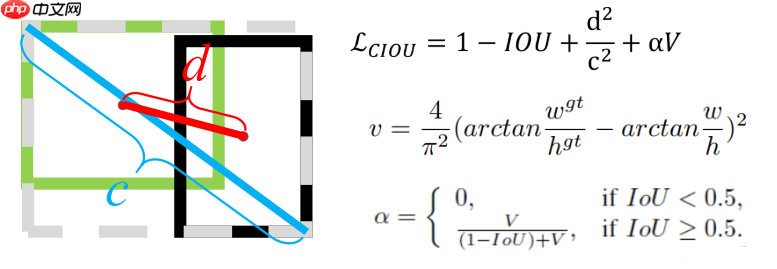
两框之间距离表示: 在CIoU的设计里,作者考虑到了两个目标框距离对收敛的影响性,所以通过两框中心之间的距离和两框对角线距离之比来衡量两个框之间的距离。
两框长宽比例表示: 在上述公式中,还有aV一项,其通过计算两框长宽之比的差来表示(arctan设计用于在反向传播求导时,防止梯度爆炸),而a这一项的设计在与:当两个框的IOU很小时,即两框不相交时,没必要考虑两个框之间的长框比例,只有IOU较大,也即两框较接近时,才去考虑长框的事。
SIoU的设计总体来说,相较于之前的设计,除了考虑了重叠区域,距离和长宽,还多考虑了两个框之间的角度问题,下面依次看看其是如何设计。
两框角度考虑: 作者在SIoU中引入角度的损失,主要是为了辅助两框之间的距离来计算的,因为在目标检测的一开始的训练中,大多少的预测框是跟真实框不相交的,所以如何快速的收敛两框之间的距离是值得考虑的。
而其具体的作用,跟下面的两框的距离结合起来一起来看。(这里的公式a,在大于45°时,换成β,即从x轴上的角度考虑转换成考虑y轴)
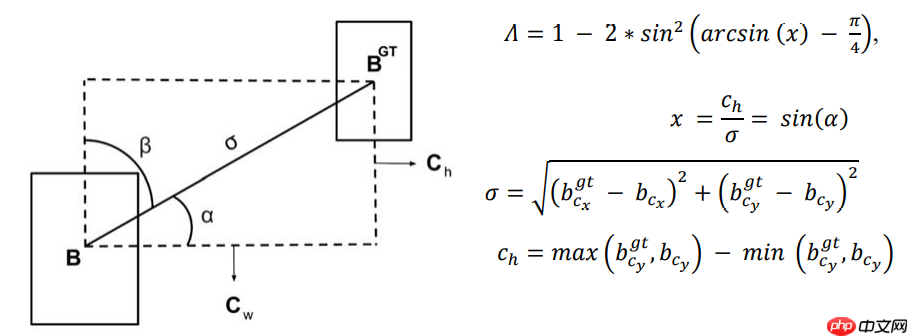
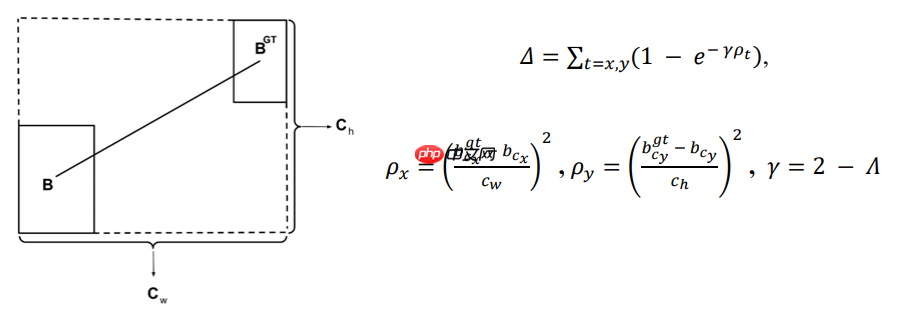
两框距离考虑: 其实这里的距离考虑,整体来说和上面介绍CIOU的思想是差不多的,通过两框中心的距离和外接矩形的长框来构建,但其多了一项γ,这一项则是和上面两框之间角度的考虑是挂钩的。
具体的说:以X轴为例,即两框近乎平行时,a趋近与0,这样计算出来两框之间的角度距离接近于0,此时γ也接近于2,那么两框之间的距离对于整体loss的贡献变少了。而当a趋近与45°时,计算出来两框之间的角度为1,此时γ接近1,则两框之间的距离应该被重视,需要占更大的loss。
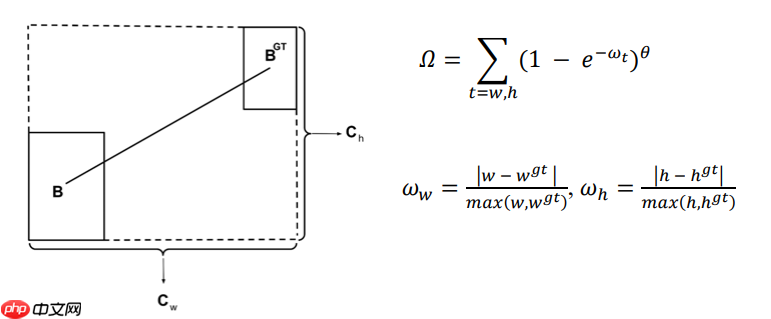
两框长宽考虑: 这里作者考虑的两框之间的长宽比,是通过计算两框之间宽之差和二者之间最大宽之比(长同理)来定义的,个人感觉和CIOU的相比,虽然形式上不一样,但大体思路是一样的,只不过CIOU可以的考虑是两框整体形状的收敛,而SIoU是以长、宽两个边收敛来达到整体形状收敛的效果。
这里另外一说,θ是个可调变量,来表示网络需要对形状这个,给予多少注意力,即占多少权重。实验中设置为4。
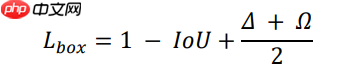
重叠区域考虑: 重叠区域的考虑其实就是普通的IoU啦,最后整体Loss以下式表达。
说了这么多,下面就以PaddleDetection套件为开发环境,来复现一下SIoU,并和传统的GIOU以及CIOU进行比较。
以套件中提供的交通标志数据集为参考数据集,以YOLOE网络为基础,复现SIoU。
这里下载下来的数据集是VOC格式的,只需要用套件自带的脚本,非常方便就可以转换为COCO格式,用于训练。
!git clone https://gitee.com/paddlepaddle/PaddleDetection.git
# 按照Paddledetection%cd PaddleDetection/ !pip install -r /home/aistudio/PaddleDetection/requirements.txt !python setup.py install %cd ..
# 下载数据集%cd PaddleDetection/ !python dataset/roadsign_voc/download_roadsign_voc.py
# 利用paddledetection自带的脚本,来将数据集转成coco形式%cd /home/aistudio/PaddleDetection/#转换train!python tools/x2coco.py \
--dataset_type voc \
--voc_anno_dir /home/aistudio/PaddleDetection/dataset/roadsign_voc/ \
--voc_anno_list /home/aistudio/PaddleDetection/dataset/roadsign_voc/train.txt \
--voc_label_list /home/aistudio/PaddleDetection/dataset/roadsign_voc/label_list.txt \
--voc_out_name /home/aistudio/PaddleDetection/dataset/roadsign_voc/voc_train.json#转换val!python tools/x2coco.py \
--dataset_type voc \
--voc_anno_dir /home/aistudio/PaddleDetection/dataset/roadsign_voc/ \
--voc_anno_list /home/aistudio/PaddleDetection/dataset/roadsign_voc/valid.txt \
--voc_label_list /home/aistudio/PaddleDetection/dataset/roadsign_voc/label_list.txt \
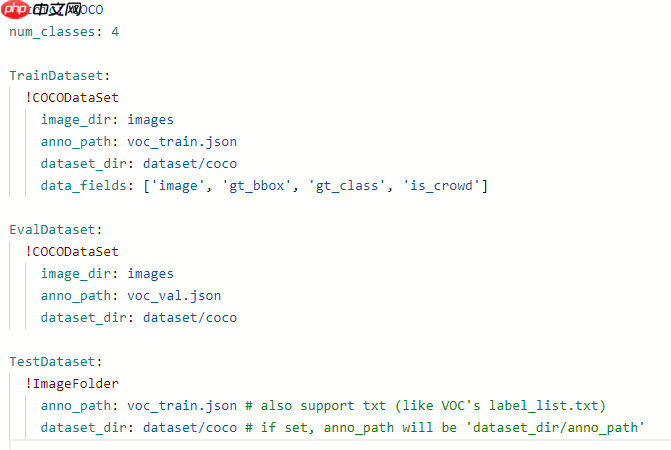
--voc_out_name /home/aistudio/PaddleDetection/dataset/roadsign_voc/voc_val.json# 移入coco数据集!mv dataset/roadsign_voc/* dataset/coco训练前,我们需要配置一下config文件,具体我们将config/datasets/coco_detection.yml修改为如下。
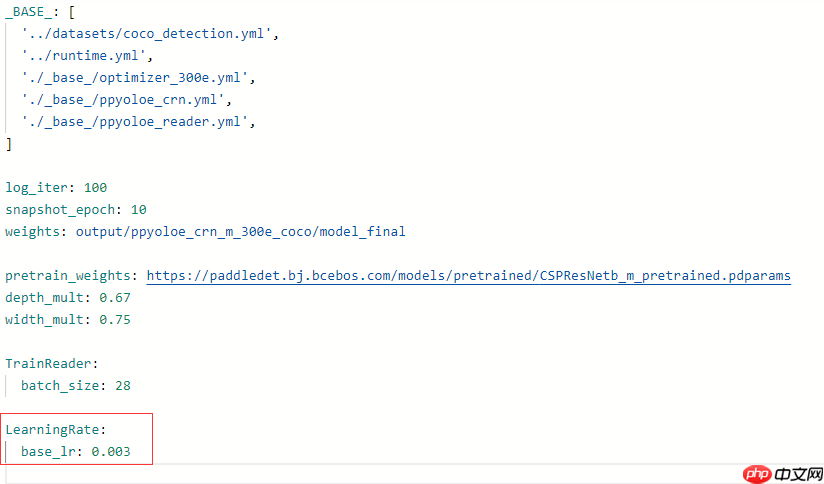
修改configs/ppyoloe/ppyoloe_crn_m_300e_coco.yml文件中的学习率为0.003.
如果我们不修改Loss,默认使用的是GIOU loss
要修改YOLOE的loss,要去ppdet/modeling/heads/ppyoloe_head.py文件下进行修改。
我们将第21行改为
from ..losses import GIoULoss, DIouLoss
并将ppdet/modeling/losses/iou_loss.py中的class DIouLoss类,修改如下。
class DIouLoss(GIoULoss): """
Distance-IoU Loss, see https://arxiv.org/abs/1911.08287
Args:
loss_weight (float): giou loss weight, default as 1
eps (float): epsilon to avoid divide by zero, default as 1e-10
use_complete_iou_loss (bool): whether to use complete iou loss
"""
def __init__(self, loss_weight=1., eps=1e-10, siou=False,use_complete_iou_loss=True):
super(DIouLoss, self).__init__(loss_weight=loss_weight, eps=eps)
self.use_complete_iou_loss = use_complete_iou_loss
self.siou = siou
def __call__(self, pbox, gbox, iou_weight=1.):
x1, y1, x2, y2 = paddle.split(pbox, num_or_sections=4, axis=-1)
x1g, y1g, x2g, y2g = paddle.split(gbox, num_or_sections=4, axis=-1)
cx = (x1 + x2) / 2
cy = (y1 + y2) / 2
w = x2 - x1 h = y2 - y1 cxg = (x1g + x2g) / 2
cyg = (y1g + y2g) / 2
wg = x2g - x1g hg = y2g - y1g x2 = paddle.maximum(x1, x2) y2 = paddle.maximum(y1, y2) # A and B
xkis1 = paddle.maximum(x1, x1g) ykis1 = paddle.maximum(y1, y1g) xkis2 = paddle.minimum(x2, x2g) ykis2 = paddle.minimum(y2, y2g) # A or B
xc1 = paddle.minimum(x1, x1g) yc1 = paddle.minimum(y1, y1g) xc2 = paddle.maximum(x2, x2g) yc2 = paddle.maximum(y2, y2g) intsctk = (xkis2 - xkis1) * (ykis2 - ykis1) intsctk = intsctk * paddle.greater_than(
xkis2, xkis1) * paddle.greater_than(ykis2, ykis1) unionk = (x2 - x1) * (y2 - y1) + (x2g - x1g) * (y2g - y1g
) - intsctk + self.eps iouk = intsctk / unionk if self.siou: cw = xc2 - xc1 ch = yc2 - yc1 s_cw = (x1g + x1 - x2g - x2) * 0.5
s_ch = (y1g + y1 - y2g - y2) * 0.5
sigma = paddle.pow(s_cw ** 2 + s_ch ** 2, 0.5) + self.eps sin_alpha_1 = paddle.abs(s_cw) / sigma sin_alpha_2 = paddle.abs(s_ch) / sigma threshold = pow(2, 0.5) / 2
sin_alpha = paddle.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1) angle_cost = paddle.sin(paddle.asin(sin_alpha) * 2) rho_x = (s_cw / (cw + self.eps)) ** 2
rho_y = (s_ch / (ch + self.eps)) ** 2
gamma = angle_cost - 2
distance_cost = 2 - paddle.exp(gamma * rho_x) - paddle.exp(gamma * rho_y) omiga_w = paddle.abs(w - wg) / paddle.maximum(w, wg) omiga_h = paddle.abs(h - hg) / paddle.maximum(h, hg) shape_cost = paddle.pow(1 - paddle.exp(-1 * omiga_w), 4) + paddle.pow(1 - paddle.exp(-1 * omiga_h), 4)
return paddle.mean((1- (iouk - 0.5 * (distance_cost + shape_cost))))*self.loss_weight # DIOU term
dist_intersection = (cx - cxg) * (cx - cxg) + (cy - cyg) * (cy - cyg) dist_union = (xc2 - xc1) * (xc2 - xc1) + (yc2 - yc1) * (yc2 - yc1) diou_term = (dist_intersection + self.eps) / (dist_union + self.eps) # CIOU term
ciou_term = 0
if self.use_complete_iou_loss: ar_gt = wg / hg ar_pred = w / h arctan = paddle.atan(ar_gt) - paddle.atan(ar_pred) ar_loss = 4. / np.pi / np.pi * arctan * arctan alpha = ar_loss / (1 - iouk + ar_loss + self.eps)
alpha.stop_gradient = True ciou_term = alpha * ar_loss diou = paddle.mean((1 - iouk + ciou_term + diou_term) * iou_weight)
return diou * self.loss_weight这样我们在ppyoloe_head文件的81行,使用下面的代码,即开启了SIoU的使用。
self.iou_loss = DIouLoss(siou=True, use_complete_iou_loss=False)
%cd PaddleDetection/ !python tools/train.py -c ../myconfig/ppyoloe_crn_m_300e_coco.yml --use_vdl=true --vdl_log_dir=vdl_dir/Test --eval \
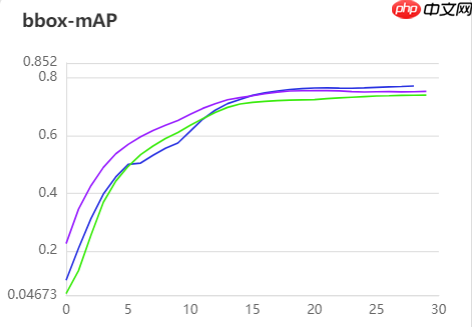
紫色为SIOU曲线
深蓝色为CIOU曲线
绿色为GIOU曲线
以上就是【AI达人特训营】SIOU论文复现:Powerful的回归框学习能力的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

 广告
广告Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号







 534
534























