本文是对苹果公司2017年VoxelNet论文的复现项目介绍。该网络基于点云实现3D物体检测,通过VFE层提取体素特征,经3D卷积和RPN网络完成检测。项目可训练评估,但单卡训练未达论文精度,存在内存泄漏问题。还介绍了数据集准备、库安装、训练评估步骤及部分结果指标。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

本项目主要是对来自2017年苹果公司基于点云的3D物体检测论文"VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection"进行复现。 VoxelNet只利用点云数据,在无人驾驶环境下实现了高精度的三维物体检测。
Note:项目目前可以训练、可以评估预测。但是(单卡训练,bs=2,epoch=100)未达到论文精度(论文bs=16,epoch=160)。有兴趣的同学可以自己尝试
另外重要的是:训练存在内存泄漏问题,之前定位到dataloader泄漏,不知道是数据预处理部分有问题还是paddle的问题,但是自己没闲功夫修改了,具体位置有兴趣的同学自己排查吧。 不然就得训练一段时间断掉再resume,其中train_fix_oom.py就是采用了读取内存,超过阈值resume的方案~
想要复现指标,一个是要调整参数(主要是yaml文件里的参数,但是参数改动可能造成出错),一个是要把项目里的bug fix掉噢!我认为调大batchsize应该会有大的提升!但是我并未尝试过多卡训练,所以可能会出问题。
ps:本项目主要是从second修改而来,所以稍加修改即可复现second和pointpillar。
之前训练(未训练完)的某次结果指标:
Car AP@0.70, 0.70, 0.70:bbox AP:53.40, 41.52, 35.37bev AP:52.85, 40.87, 34.853d AP:50.86, 36.90, 30.71aos AP:28.13, 23.91, 21.17Car AP@0.70, 0.50, 0.50:bbox AP:53.40, 41.52, 35.37bev AP:53.44, 42.09, 35.773d AP:53.42, 41.90, 35.65aos AP:28.13, 23.91, 21.17
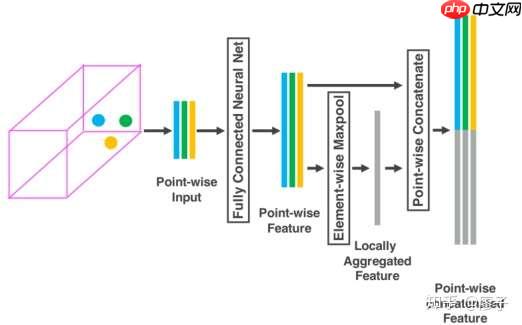
将三维点云划分为一定数量的Voxel,经过点的随机采样以及归一化后,对每一个非空Voxel使用若干个VFE(Voxel Feature Encoding)层进行局部特征提取,得到Voxel-wise Feature,然后经过3D Convolutional Middle Layers进一步抽象特征(增大感受野并学习几何空间表示),最后使用RPN(Region Proposal Network)对物体进行分类检测与位置回归。VoxelNet整个pipeline如下图所示。
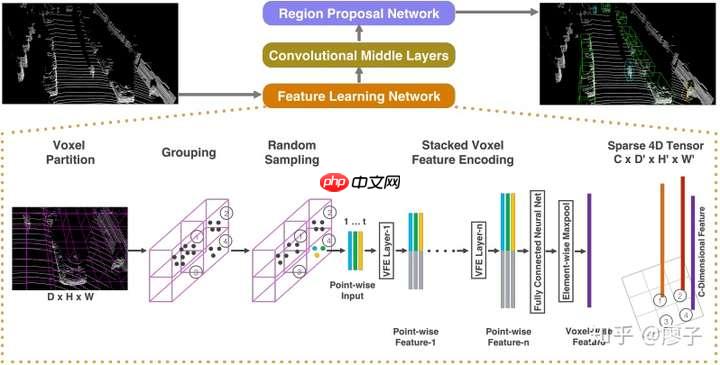
通过层叠的VFE层将体素编码,然后3D卷积进一步放大局部voxel特征,将点云转化成高维的体积的表达。最后通过RPN产生检测结果。

论文中提到,RPN 中的 FCN网络分为 3 块,每一块都会实现 2x 效果的下采样率。然后,又实现了向上采样,将倒数 3 块上采样到固定的尺寸,然后拼接起来。最终,由上采样拼接后的卷积引出 2 个目标分支:概率图和回归图 注意它们的尺寸,概率图通道数是 2,代表正负 anchor 的概率,这个概率应该通过 softmax 处理过。 回归图的通道数是 7,代表的就是一个 anchor 的 3D 信息(x,y,z,l,w,h,theta)
总体 Loss 由 2 部分组成:

VoxelNet网络在KITTI数据集中的3D Detection数据集上面进行训练,数据集中包含7481张训练图片以及7518张测试图片,一共有80256个标记物体,并且测试模式包含普通的视角以及鸟瞰视角。
!rm -rf kitti/ !mkdir -p kitti/training/velodyne_reduced !mkdir -p kitti/testing/velodyne_reduced
!unzip data/data50186/data_object_calib.zip -d kitti/
!unzip data/data50186/image_training.zip -d kitti/training/ !unzip data/data50186/data_object_label_2.zip -d kitti/training/ !unzip data/data50186/velodyne_training_1.zip -d kitti/training/ !unzip data/data50186/velodyne_training_2.zip -d kitti//training/ !unzip data/data50186/velodyne_training_3.zip -d kitti/training/
!unzip data/data50186/image_testing.zip -d kitti/testing/ !unzip data/data50186/velodyne_testing_1.zip -d kitti/testing/ !unzip data/data50186/velodyne_testing_2.zip -d kitti/testing/ !unzip data/data50186/velodyne_testing_3.zip -d kitti/testing/
!mv kitti/training/training/* kitti/training/ !rm -rf kitti/training/training/ !mv kitti/testing/testing/* kitti/testing/ !rm -rf kitti/testing/testing/
!mkdir kitti/training/velodyne !mv kitti/training/velodyne_training_1/* kitti/training/velodyne/ !mv kitti/training/velodyne_training_2/* kitti/training/velodyne/ !mv kitti/training/velodyne_training_3/* kitti/training/velodyne/ !rm -rf kitti/training/velodyne_training_1 !rm -rf kitti/training/velodyne_training_2 !rm -rf kitti/training/velodyne_training_3 !mkdir kitti/testing/velodyne !mv kitti/testing/velodyne_testing_1/* kitti/testing/velodyne !mv kitti/testing/velodyne_testing_2/* kitti/testing/velodyne !mv kitti/testing/velodyne_testing_3/* kitti/testing/velodyne !rm -rf kitti/testing/velodyne_testing_1 !rm -rf kitti/testing/velodyne_testing_2 !rm -rf kitti/testing/velodyne_testing_3
!pip install shapely pybind11 protobuf scikit-image pillow fire scikit-image memory_profiler psutil !pip install numpy==1.17!pip install numba==0.48.0
对KITTI数据集进行处理。
kitti/
├── training/
├── ├── calib
├── ├── image_2
├── ├── label_2
├── ├── velodyne
├── └── velodyne_reduced
├── testing/
├── ├── calib
├── ├── image_2
├── ├── velodyne
├── └── velodyne_reduced
├── gt_database/
├── 4264_Car_1.bin
...
├── kitti_dbinfos_train.pkl├── kitti_infos_test.pkl├── kitti_infos_train.pkl├── kitti_infos_trainval.pkl├── kitti_infos_val.pkl├── test.txt├── train.txt├── trainval.txt└── val.txt!tree -L 1 kitti/
%cp -r kittiinfo/* kitti/
%cd Voxelnet
!python create_data.py create_kitti_info_file --data_path=/home/aistudio/kitti ## 报错的话,可能需要修改create_data.py内的路径
!python create_data.py create_reduced_point_cloud --data_path=/home/aistudio/kitti
!python create_data.py create_groundtruth_database --data_path=/home/aistudio/kitti
# !python train.py train --cfg_file=configs/voxelnet_kitti_car.yaml --model_dir=./output#或者!python train_mgpu.py --config=configs/voxelnet_kitti_car.yaml --model_dir=./output --use_vdl=True
!python eval.py eval --cfg_file=configs/voxelnet_kitti_car.yaml --model_dir=./output
以上就是VoxelNet:基于点云的三维空间信息逐层次学习网络的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

 C++高性能并发应用_C++如何开发性能关键应用
C++高性能并发应用_C++如何开发性能关键应用
 Java AI集成Deep Java Library_Java怎么集成AI模型部署
Java AI集成Deep Java Library_Java怎么集成AI模型部署
 Golang后端API开发_Golang如何高效开发后端和API
Golang后端API开发_Golang如何高效开发后端和API
 Python异步并发改进_Python异步编程有哪些新改进
Python异步并发改进_Python异步编程有哪些新改进
 C++系统编程内存管理_C++系统编程怎么与Rust竞争内存安全
C++系统编程内存管理_C++系统编程怎么与Rust竞争内存安全
 Java GraalVM原生镜像构建_Java怎么用GraalVM构建高效原生镜像
Java GraalVM原生镜像构建_Java怎么用GraalVM构建高效原生镜像
 Python FastAPI异步API开发_Python怎么用FastAPI构建异步API
Python FastAPI异步API开发_Python怎么用FastAPI构建异步API
 C++现代C++20/23/26特性_现代C++有哪些新标准特性如modules和coroutines
C++现代C++20/23/26特性_现代C++有哪些新标准特性如modules和coroutines
 广告
广告Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 224
224















