






本项目基于DDRNet实现实时语义分割,将其由其他框架转为PaddlePaddle实现并轻量化,用深度可分卷积提升推理速度。使用surpvisely人像数据集,提供带中文注释的网络文件,需创建YML配置文件按PaddleSeg流程训练,还包含数据集处理、训练及测试相关代码与说明。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

项目背景
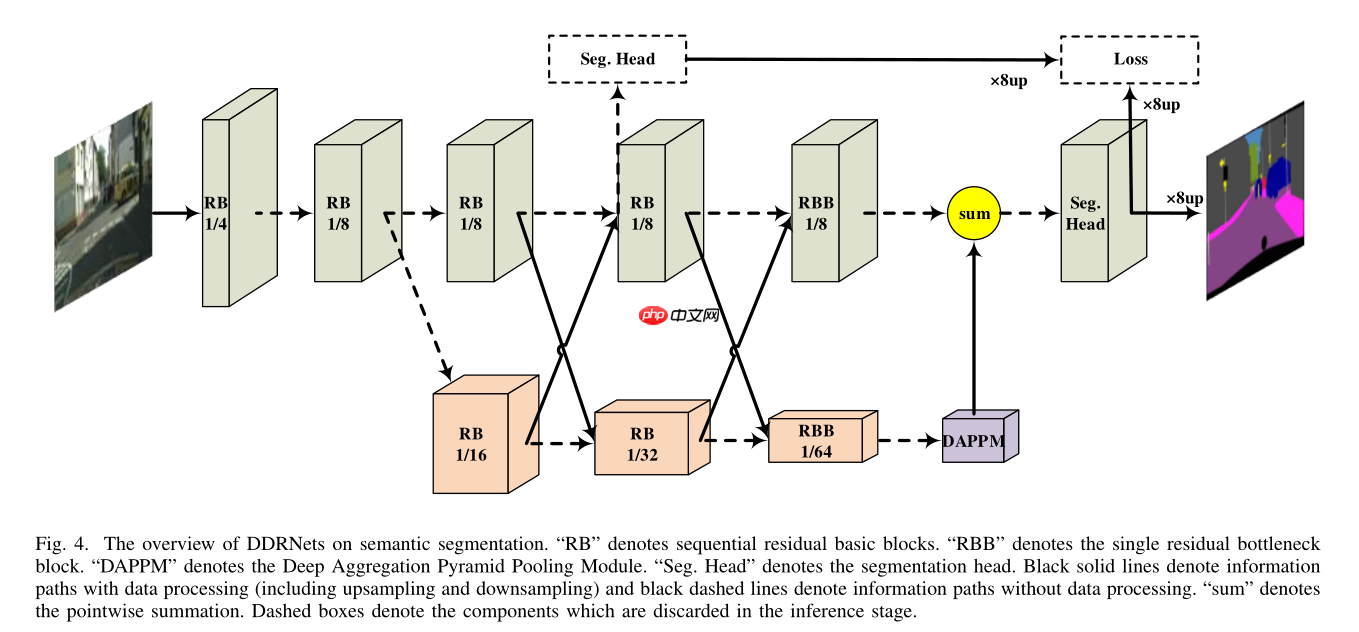
本项目是基于实时准确语义分割的深度双分辨率网络DDRNet创建的,其中DDRNet一个版本Cityscapes test上达到109 FPS / 77.4%mIoU!表现达到SOTA!综合性能优于SFNet、MSFNet和BiSeNetV2等网络。因为项目需求,需要使用到DDRNet,而paddleseg里面尚未内置有DDRNet的网络文件,而源代码作者已经开源,但是是基于其他框架实现的,所以我就将源代码改为使用paddlepaddle实现,并且将其做了一定的改进。
1.本项目中的DDRNet的网络实现并不是原版,因为项目需要,所以我对其做了一定的轻量化处理,进行了将普通卷积替换成深度可分卷积等操作,让该网络的推理速度得到了进一步的提升。
2.网络文件在Notebook处,可根据需要修改,并且将其按照PaddleSeg官方文档,进行自定义模型,完成训练。
3.本项目的数据集是surpvisely人像数据集,可根据需要进行修改。
4.网络文件已经进行了中文注释,方便阅读。
!pip install paddleseg
!git clone https://gitee.com/PaddlePaddle/PaddleSeg
#进入数据集目录%cd data/data61378/
/home/aistudio/data/data61378
#对数据集进行解压,并且返回根目录!unzip humanseg.zip%cd
相关配置提示
因为本项目所使用的DDRNet并非paddleseg内置的网络模型
所以需要自己创建YML文件,以及模型文件,在下方的Code Block中已经给出,可根据需要自己更改,如不是很了解YML文件如何使用,可以在paddleseg的仓库中,找到相关的使用教程
此处附上链接: https://gitee.com/paddlepaddle/PaddleSeg#%E4%BD%BF%E7%94%A8%E6%95%99%E7%A8%8B-
YML配置文件,应创建在 work/PaddleSeg/configs/ddrnet/ddrnet.yml 路径下 下方为YML文件内容,复制粘贴进去即可
以下为YML文件配置
batch_size: 48 # 设定迭代一次送入网络的图片数量。一般来说,你所使用机器的显存越大,可以调高batch_size的值。iters: 5000 # 迭代次数model:
type: DDRNet # 自定义模型类的名称
num_classes: 2 # 标注图中像素类别个数。你的模型应该是根据具体的分割任务设计的,因此你知道该任务下像素类别个数
pretrained: output/iter_12000 # 如果你有网络的与预训练参数,请指定其存放路径train_dataset:
type: Dataset # 自定义数据集类的名称
dataset_root: data/data61378/humanseg/
train_path: data/data61378/humanseg/train.txt
num_classes: 2 #此处为模型输出类别数, 本项目中为人像分割,所以有人像+背景两类,故为2
transforms:
- type: Resize
target_size: [512, 512] - type: ResizeStepScaling
min_scale_factor: 0.5
max_scale_factor: 2.0
scale_step_size: 0.25
- type: RandomPaddingCrop
crop_size: [512, 512] - type: RandomHorizontalFlip
- type: RandomDistort
brightness_range: 0.4
contrast_range: 0.4
saturation_range: 0.4
- type: Normalize
mode: train # 对训练集设定训练模式val_dataset:
type: Dataset
dataset_root: data/data61378/humanseg/
val_path: data/data61378/humanseg/val.txt
num_classes: 2
transforms:
- type: Resize
target_size: [512, 512] - type: Normalize
mode: val # 对验证集设定验证模式optimizer: # 优化器设置
type: sgd
momentum: 0.9
weight_decay: 4.0e-5lr_scheduler: # 学习率的设置
type: PolynomialDecay
learning_rate: 0.01
power: 0.9
end_lr: 0# lr_scheduler:# type: ReduceOnPlateau# learning_rate: 0.04# mode: 'min'# factor: 0.6# patience: 1000# threshold_mode: 'rel'# verbose: Trueloss:
types:
- type: CrossEntropyLoss
coef: [1]
数据集处理
接下来的两个Code Block为处理数据集的代码,将surpervisely数据集的格式处理为符合paddleseg套件的要求格式进行训练。

使用模板与程序分离的方式构建,依靠专门设计的数据库操作类实现数据库存取,具有专有错误处理模块,通过 Email 实时报告数据库错误,除具有满足购物需要的全部功能外,成新商城购物系统还对购物系统体系做了丰富的扩展,全新设计的搜索功能,自定义成新商城购物系统代码功能代码已经全面优化,杜绝SQL注入漏洞前台测试用户名:admin密码:admin888后台管理员名:admin密码:admin888
数据处理完之后,会生成两个txt文件,train.txt文件和val.txt文件,分别对应训练数据集的路径,和验证数据集路径
#将数据集中的标签文件转换为符合paddle框架要求的标签文件#此处处理时间会比较久,需要稍微等待一下import cv2import osimport numpy as npfrom tqdm import tqdmdef three2one(path,path_):
img=cv2.imread(path)
img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret,img=cv2.threshold(img,2,255,cv2.THRESH_BINARY)
img = np.uint8((np.double(img)) / 255)
cv2.imwrite(path_,img)
root = r'data/data61378/humanseg/person_mask'root_ = r'data/data61378/humanseg/person_mask_data'if not os.path.exists(root_):
os.mkdir(root_)
names = os.listdir(root)for i,name in enumerate(names): if name[-2]=='n': # print(name[-3])
path = os.path.join(root,name)
path_ = os.path.join(root_,name) # print(path)
three2one(path,path_)# 适配数据集路径-0src_0 = r'data/data61378/humanseg/person_mask'dst_0 = r'data/data61378/humanseg/person_mask_orig'os.rename(src_0, dst_0)# 适配数据集路径-1src_1 = r'data/data61378/humanseg/person_mask_data'dst_1 = r'data/data61378/humanseg/person_mask'os.rename(src_1, dst_1)print('Done!')
Done!
###surpervisely数据集的label和train.txt的生成###挂载的数据集的label和train的txt文件里面的内容是重复的###将数据集打乱,按9:1比例划分训练集和验证集#进入目标目录%cd data/data61378/humansegimport osimport numpy as npfrom tqdm import tqdmimport matplotlib.pyplot as pltimport cv2from PIL import Image
data = []
path_img = 'person'path_lab = 'person_mask'train_txt = 'train.txt'label_txt = 'val.txt'def dataset(data, path_img, path_lab):
for item in os.listdir(path_img):
img = os.path.join(path_img, item)
label = os.path.join(path_lab, item.split('.')[0] + '.png')
data.append([os.path.join(path_img, item),
os.path.join(path_lab, item.split('.')[0] + '.png')
]) if os.path.exists(img) and os.path.exists(label): pass
else: raise 'path error!'
np.random.shuffle(data) # 划分训练集和验证集
train_data = data[len(data) // 9:]
val_data = data[:len(data) // 9]
write_path(train_data, train_txt)
write_path(val_data, label_txt)def write_path(data, path):
with open(path ,'w') as f: for item in tqdm(data):
f.write(item[0] + ' ' + item[1] + '\n') print('Done!') print('Total: ', len(data))#显示出来看看对不对def draw(img_list, name=None):
plt.figure(figsize=(20, 20)) for i in range(len(img_list)):
plt.subplot(1, len(img_list), i+1)
plt.imshow(img_list[i]) if name:
plt.title(name[i]) #plt.legend()
plt.show()#处理数据集图片dataset(data, path_img, path_lab)#展示测试img1 = cv2.cvtColor(cv2.imread('person/active-cold-female-girl-41371.jpeg'), cv2.COLOR_BGR2RGB) # BGR -> RGBimg2_lab = cv2.imread('person_mask/active-cold-female-girl-41371.png')[..., 0]
draw([img1, img2_lab])#返回根目录%cd
100%|██████████| 5077/5077 [00:00<00:00, 936968.43it/s] 100%|██████████| 634/634 [00:00<00:00, 518562.55it/s]
/home/aistudio/data/data61378/humanseg Done! Total: 5077 Done! Total: 634
/home/aistudio
DDRNet网络文件
下方的code blcok为DDRNet的实现
我对其进行了一定的轻量化处理,在性能降低很小的情况下,加快了在CPU上的推理速度。
自定义网络文件的路径为 work/PaddleSeg/paddleseg/models/ddrnet.py
并且需要在work/PaddleSeg/paddleseg/models/init.py 中进行初始化,具体使用教程在paddleseg仓库中已经有提及,并且非常详细。
下图为DDRNet的结构图
'''
DDRNet网络文件,进行了轻量化,将卷积替换成深度可分卷积,并进行了channel_shuffle
目前测试,在CPU推理时间为200ms/张
GPU推理时间为60ms/张
'''from paddleseg.models import layersfrom paddleseg.cvlibs import managerfrom paddleseg.utils import utilsimport paddleimport paddle.nn as nnimport paddle.nn.functional as Fimport numpy as np
bn_mom = 0.1def channel_shuffle(x, groups):
### type: (torch.Tensor, int) -> torch.Tensor
#print(x.shape)
batchsize, num_channels, height, width = x.shape
channels_per_group = num_channels // groups # reshape
x = paddle.reshape(x, [batchsize, groups, channels_per_group, height, width])
x = paddle.transpose(x, [0, 2, 1, 3, 4]) # flatten
x = paddle.reshape(x, [batchsize, -1, height, width]) return xclass DwConv(nn.Layer):
def __init__(self, inplanes, out_channels, kernel_size=3, stride=1, padding=1,bias_attr=False):
super(DwConv, self).__init__()
self.depth_conv = nn.Conv2D(inplanes, inplanes, kernel_size=kernel_size, stride=stride, padding=padding, groups=inplanes, bias_attr=bias_attr)
self.point_conv = nn.Conv2D(inplanes, out_channels, kernel_size=1, stride=1, padding=0, groups=8,bias_attr=bias_attr) def forward(self, x):
x = self.depth_conv(x)
x = self.point_conv(x)
x = channel_shuffle(x, groups=8) return x#论文作者修改过了的resblockclass basicBlock(nn.Layer):
expansion = 1
def __init__(self,inplanes, out_channels, stride=1, downsample=None, no_relu=False):
super(basicBlock, self).__init__()
self.conv1 = DwConv(inplanes, out_channels, kernel_size=3,
stride=stride,padding=1)
self.bn1 = nn.BatchNorm2D(out_channels, momentum=bn_mom)
self.relu = nn.ReLU()
self.conv2 = DwConv(out_channels, out_channels,kernel_size=3,
stride=1,padding=1)
self.bn2 = nn.BatchNorm2D(out_channels, momentum=bn_mom)
self.downsample = downsample
self.stride = stride
self.no_relu = no_relu def forward(self, x):
res = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out) if self.downsample is not None:
res = self.downsample(x)
out += res if self.no_relu: return out else: return self.relu(out)class Bottleneck(nn.Layer):
expansion = 2 #通道扩大倍数
def __init__(self, inplanes, out_channels, stride=1, downsample=None, no_relu=True):
super(Bottleneck, self).__init__() super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2D(inplanes, out_channels, kernel_size=1, bias_attr=False)
self.bn1 = nn.BatchNorm2D(out_channels, momentum=bn_mom)
self.conv2 = DwConv(out_channels, out_channels, kernel_size=3, stride=stride,
padding=1, bias_attr=False)
self.bn2 = nn.BatchNorm2D(out_channels, momentum=bn_mom)
self.conv3 = nn.Conv2D(out_channels, out_channels * self.expansion, kernel_size=1,
bias_attr=False)
self.bn3 = nn.BatchNorm2D(out_channels * self.expansion, momentum=bn_mom)
self.relu = nn.ReLU()
self.downsample = downsample
self.stride = stride
self.no_relu = no_relu def forward(self, x):
res = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out) if self.downsample is not None:
res = self.downsample(x)
out += res if self.no_relu: return out else: return self.relu(out)#论文中提出的特征提取结构 实验中效果比PPM更好class DAPPM(nn.Layer):
def __init__(self, inplanes, branch_planes, outplanes):
super(DAPPM, self).__init__() #获得不同感受野
self.scale0 = nn.Sequential(
nn.BatchNorm2D(inplanes, momentum=bn_mom),
nn.ReLU(),
nn.Conv2D(inplanes, branch_planes, kernel_size=1, bias_attr=False),
)
self.scale1 = nn.Sequential(nn.AvgPool2D(kernel_size=5, stride=2, padding=2),
nn.BatchNorm2D(inplanes, momentum=bn_mom),
nn.ReLU(),
nn.Conv2D(inplanes, branch_planes, kernel_size=1, bias_attr=False),
)
self.scale2 = nn.Sequential(nn.AvgPool2D(kernel_size=9, stride=4, padding=4),
nn.BatchNorm2D(inplanes, momentum=bn_mom),
nn.ReLU(),
nn.Conv2D(inplanes, branch_planes, kernel_size=1, bias_attr=False),
)
self.scale3 = nn.Sequential(nn.AvgPool2D(kernel_size=17, stride=8, padding=8),
nn.BatchNorm2D(inplanes, momentum=bn_mom),
nn.ReLU(),
nn.Conv2D(inplanes, branch_planes, kernel_size=1, bias_attr=False),
)
self.scale4 = nn.Sequential(nn.AdaptiveAvgPool2D((1, 1)),
nn.BatchNorm2D(inplanes, momentum=bn_mom),
nn.ReLU(),
nn.Conv2D(inplanes, branch_planes, kernel_size=1, bias_attr=False),
) #对不同感受野特征图进行特征提取
self.process1 = nn.Sequential(
nn.BatchNorm2D(branch_planes, momentum=bn_mom),
nn.ReLU(),
DwConv(branch_planes, branch_planes, kernel_size=3, padding=1, bias_attr=False),
)
self.process2 = nn.Sequential(
nn.BatchNorm2D(branch_planes, momentum=bn_mom),
nn.ReLU(),
DwConv(branch_planes, branch_planes, kernel_size=3, padding=1, bias_attr=False),
)
self.process3 = nn.Sequential(
nn.BatchNorm2D(branch_planes, momentum=bn_mom),
nn.ReLU(),
DwConv(branch_planes, branch_planes, kernel_size=3, padding=1, bias_attr=False),
)
self.process4 = nn.Sequential(
nn.BatchNorm2D(branch_planes, momentum=bn_mom),
nn.ReLU(),
DwConv(branch_planes, branch_planes, kernel_size=3, padding=1, bias_attr=False),
) #concat层
self.compression = nn.Sequential(
nn.BatchNorm2D(branch_planes * 5, momentum=bn_mom),
nn.ReLU(),
nn.Conv2D(branch_planes * 5, outplanes, kernel_size=1, bias_attr=False),
)
self.shortcut = nn.Sequential(
nn.BatchNorm2D(inplanes, momentum=bn_mom),
nn.ReLU(),
nn.Conv2D(inplanes, outplanes, kernel_size=1, bias_attr=False),
) def forward(self, x):
# x.shape: NCHW
width = x.shape[-1]
height = x.shape[-2]
x_list = []
x_list.append(self.scale0(x))
x_list.append(self.process1((F.interpolate(self.scale1(x),
size=[height, width],
mode='bilinear') + x_list[0])))
x_list.append((self.process2((F.interpolate(self.scale2(x),
size=[height, width],
mode='bilinear') + x_list[1]))))
x_list.append(self.process3((F.interpolate(self.scale3(x),
size=[height, width],
mode='bilinear') + x_list[2])))
x_list.append(self.process4((F.interpolate(self.scale4(x),
size=[height, width],
mode='bilinear') + x_list[3]))) # NCHW
out = self.compression(paddle.concat(x_list, 1)) + self.shortcut(x) return outclass segmenthead(nn.Layer):
def __init__(self, inplanes, interplanes, outplanes, scale_factor=None):
super(segmenthead, self).__init__()
self.bn1 = nn.BatchNorm2D(inplanes, momentum=bn_mom)
self.conv1 = DwConv(inplanes, interplanes, kernel_size=3, padding=1, bias_attr=False)
self.bn2 = nn.BatchNorm2D(interplanes, momentum=bn_mom)
self.relu = nn.ReLU()
self.conv2 = nn.Conv2D(interplanes, outplanes, kernel_size=1, padding=0, bias_attr=True)
self.scale_factor = scale_factor def forward(self, x):
x = self.conv1(self.relu(self.bn1(x)))
out = self.conv2(self.relu(self.bn2(x))) if self.scale_factor is not None:
height = x.shape[-2] * self.scale_factor
width = x.shape[-1] * self.scale_factor
out = F.interpolate(out,
size=[height, width],
mode='bilinear') return outclass DualRseNet(nn.Layer): #双边残存网络
def __init__(self, block, layers, num_classes=2, planes=64, spp_planes=128, head_planes=128, augment=False,pretrained=None):
super(DualRseNet, self).__init__()
hige_planes = planes * 2
self.augment = augment
self.pretrained = pretrained
self.conv1 = nn.Sequential(
nn.Conv2D(in_channels=3, out_channels=planes, kernel_size=3, stride=2, padding=1),
nn.BatchNorm2D(planes, momentum=bn_mom),
nn.ReLU(),
DwConv(planes,planes,kernel_size=3, stride=2, padding=1),
nn.BatchNorm2D(planes, momentum=bn_mom),
nn.ReLU()
)
self.relu = nn.ReLU()
self.layer1 = self._make_layer(block, planes, planes, layers[0])
self.layer2 = self._make_layer(block, planes, planes * 2, layers[1], stride=2)
self.layer3 = self._make_layer(block, planes * 2, planes * 4, layers[2], stride=2)
self.layer4 = self._make_layer(block, planes * 4, planes * 8, layers[3], stride=2)
self.compression3 = nn.Sequential(
nn.Conv2D(planes * 4, hige_planes, kernel_size=1, bias_attr=False),
nn.BatchNorm2D(hige_planes, momentum=bn_mom),
)
self.compression4 = nn.Sequential(
nn.Conv2D(planes * 8, hige_planes, kernel_size=1, bias_attr=False),
nn.BatchNorm2D(hige_planes, momentum=bn_mom),
)
self.down3 = nn.Sequential(
DwConv(hige_planes, planes * 4, kernel_size=3, stride=2, padding=1, bias_attr=False),
nn.BatchNorm2D(planes * 4, momentum=bn_mom),
)
self.down4 = nn.Sequential(
DwConv(hige_planes, planes * 4, kernel_size=3, stride=2, padding=1, bias_attr=False),
nn.BatchNorm2D(planes * 4, momentum=bn_mom),
nn.ReLU(),
DwConv(planes * 4, planes * 8, kernel_size=3, stride=2, padding=1, bias_attr=False),
nn.BatchNorm2D(planes * 8, momentum=bn_mom),
)
self.layer3_ = self._make_layer(block, planes * 2, hige_planes, 2)
self.layer4_ = self._make_layer(block, hige_planes, hige_planes, 2)
self.layer5_ = self._make_layer(Bottleneck, hige_planes, hige_planes, 1)
self.layer5 = self._make_layer(Bottleneck, planes * 8, planes * 8, 1, stride=2)
self.spp = DAPPM(planes * 16, spp_planes, planes * 4) # segmenthead 分割头
if self.augment:
self.seghead_extra = segmenthead(hige_planes, head_planes, num_classes)
self.final_layer = segmenthead(planes * 4, head_planes, num_classes) for m in self.sublayers(): if isinstance(m, nn.Conv2D):
n = m.weight.shape[0]*m.weight.shape[1]*m.weight.shape[2]
v = np.random.normal(loc=0.,scale=np.sqrt(2./n),size=m.weight.shape).astype('float32')
m.weight.set_value(v) elif isinstance(m, nn.BatchNorm):
m.weight.set_value(np.ones(m.weight.shape).astype('float32'))
m.bias.set_value(np.zeros(m.bias.shape).astype('float32'))
self.init_weight() #残差结构的生成
def _make_layer(self, block, inplanes, planes, blocks, stride=1):
downsample = None
if stride != 1 or inplanes != planes * block.expansion: # basic.expansion=1 bottle.expansion=2
downsample = nn.Sequential( # 使用conv进行下采样
nn.Conv2D(inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias_attr=False),
nn.BatchNorm2D(planes * block.expansion, momentum=bn_mom),
)
layers = []
layers.append(block(inplanes, planes, stride, downsample)) # 1个block
inplanes = planes * block.expansion for i in range(1, blocks): if i == (blocks - 1):
layers.append(block(inplanes, planes, stride=1, no_relu=True)) # 最后一个层使用relu输出
else:
layers.append(block(inplanes, planes, stride=1, no_relu=False)) return nn.Sequential(*layers) def forward(self, x):
# x.shape: NCHW
input = x
width_output = x.shape[-1] // 8
height_output = x.shape[-2] // 8
layers = []
x = self.conv1(x) # conv1
x = self.layer1(x)
layers.append(x) # conv2 layer[0]
x = self.layer2(self.relu(x))
layers.append(x) # conv3 layer[1]
x = self.layer3(self.relu(x)) # 低分辨率层
layers.append(x) # conv4 layer[2]
x_ = self.layer3_(self.relu(layers[1])) # 复制一份 高分辨率层
# Bilateral fusion 论文中的融合方法
x = x + self.down3(self.relu(x_)) # 高分辨率 通过conv下采样 与低分辨率相加
x_ = x_ + F.interpolate( # 低分辨率上采样后和高分辨率相加
self.compression3(self.relu(layers[2])), # 1x1conv 将通道下降
size=[height_output, width_output],
mode='bilinear') if self.augment:
temp = x_ # Conv5_1 使用basicblock
x = self.layer4(self.relu(x)) # 低分辨率层
layers.append(x) # conv5_1 layer[3]
x_ = self.layer4_(self.relu(x_)) # 高分辨率
# Bilateral fusion
x = x + self.down4(self.relu(x_)) # 高分辨率 通过conv下采样 与低分辨率相加
x_ = x_ + F.interpolate( # 低分辨率上采样后和高分辨率相加
self.compression4(self.relu(layers[3])), # 1x1conv 将通道下降
size=[height_output, width_output],
mode='bilinear') #print(x_)
#Conv5_1阶段 使用bottleblock
x_ = self.layer5_(self.relu(x_)) # 高分通道
x = F.interpolate( # 低分通道
self.spp(self.layer5(self.relu(x))), # 使用DAPPM进行多尺度特征融合
size=[height_output, width_output],
mode='bilinear')
x_ = self.final_layer(x + x_) if self.augment: #辅助计算损失
x_extra = self.seghead_extra(temp) return [x_, x_extra] else: return [F.interpolate(x_,
size=[input.shape[-2],input.shape[-1]],
mode='bilinear')]
def init_weight(self):
if self.pretrained is not None:
utils.load_entire_model(self, self.pretrained)
def DualResNet_imagenet(num_classes, pretrained=None):
model = DualRseNet(basicBlock, [2, 2, 2, 2], num_classes=num_classes, planes=32, spp_planes=128, head_planes=64, augment=False, pretrained=pretrained) #加载预训练模型 填入地址
return model@manager.MODELS.add_componentdef DDRNet(num_classes, pretrained):
model = DualResNet_imagenet(num_classes=num_classes, pretrained=pretrained) return model
进行训练
!python work/PaddleSeg/train.py \
--config work/PaddleSeg/configs/ddrnet/ddrnet.yml \
--do_eval \
--save_interval 500 \
--save_dir output
2022-03-17 16:58:22 [INFO]
------------Environment Information-------------
platform: Linux-4.4.0-150-generic-x86_64-with-debian-stretch-sid
Python: 3.7.4 (default, Aug 13 2019, 20:35:49) [GCC 7.3.0]
Paddle compiled with cuda: True
NVCC: Cuda compilation tools, release 10.1, V10.1.243
cudnn: 7.6
GPUs used: 1
CUDA_VISIBLE_DEVICES: None
GPU: ['GPU 0: Tesla V100-SXM2-32GB']
GCC: gcc (Ubuntu 7.5.0-3ubuntu1~16.04) 7.5.0
PaddleSeg: 2.4.0
PaddlePaddle: 2.2.2
OpenCV: 4.1.1
------------------------------------------------
2022-03-17 16:58:22 [INFO]
---------------Config Information---------------
batch_size: 48
iters: 5000
loss:
coef:
- 1
types:
- ignore_index: 255
type: CrossEntropyLoss
lr_scheduler:
end_lr: 0
learning_rate: 0.01
power: 0.9
type: PolynomialDecay
model:
num_classes: 2
pretrained: null
type: DDRNet
optimizer:
momentum: 0.9
type: sgd
weight_decay: 4.0e-05
train_dataset:
dataset_root: data/data61378/humanseg/
mode: train
num_classes: 2
train_path: data/data61378/humanseg/train.txt
transforms:
- target_size:
- 640
- 640
type: Resize
- max_scale_factor: 2.0
min_scale_factor: 0.5
scale_step_size: 0.25
type: ResizeStepScaling
- crop_size:
- 640
- 640
type: RandomPaddingCrop
- type: RandomHorizontalFlip
- brightness_range: 0.4
contrast_range: 0.4
saturation_range: 0.4
type: RandomDistort
- type: Normalize
type: Dataset
val_dataset:
dataset_root: data/data61378/humanseg/
mode: val
num_classes: 2
transforms:
- target_size:
- 640
- 640
type: Resize
- type: Normalize
type: Dataset
val_path: data/data61378/humanseg/val.txt
------------------------------------------------
W0317 16:58:22.691426 3549 device_context.cc:447] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 10.1, Runtime API Version: 10.1
W0317 16:58:22.691483 3549 device_context.cc:465] device: 0, cuDNN Version: 7.6.
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/paddle/nn/layer/norm.py:653: UserWarning: When training, we now always track global mean and variance.
"When training, we now always track global mean and variance.")
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/paddle/fluid/dygraph/math_op_patch.py:253: UserWarning: The dtype of left and right variables are not the same, left dtype is paddle.float32, but right dtype is paddle.int64, the right dtype will convert to paddle.float32
format(lhs_dtype, rhs_dtype, lhs_dtype))
2022-03-17 16:59:33 [INFO] [TRAIN] epoch: 1, iter: 10/5000, loss: 0.6333, lr: 0.009984, batch_cost: 6.6284, reader_cost: 6.25825, ips: 7.2416 samples/sec | ETA 09:11:15
^C
测试下模型分割的效果好不好
需要自己上次图片,然后在image_path填好路径噢
输出的路径为save_dir处,根据自己需求更改
!python work/PaddleSeg/predict.py \
--config work/PaddleSeg/configs/ddrnet/ddrnet.yml \
--model_path output/best_model/model.pdparams\
--image_path data/test.png \
--save_dir output/result
效果展示
import numpy as npfrom PIL import Image
img= Image.open('output/result/added_prediction/result.png')
img.show()




























